直流電機位置伺服系統驅動器設計

摘要:介紹了兩個以AT89S51芯片為核心的智能自動小車設計。第一個方案采用H橋電路,通過紅外光電傳感器對地面狀態進行判斷并把信號傳送到CPU進行相關運算。整個系統能完成小車的正向和反向運行,并有定時倒車等功能。第二個方案設計的光電電動小車能夠實時顯示時間、速度、里程,可程控行駛速度、準確定位停車等。
關鍵詞:單片機;智能小車;傳感器;H橋
方案一設計的自動小車是受到參考文獻[1]的啟發,在原有基礎上進行了改進。
原方案[1-2]采用兩塊單片機(AT89C51和AT89C2051)作為智能小車的檢測和控制核心,實現小車識別路線、判斷并自動躲避障礙、選擇正確的行進路線。驅動電機采用直流電機,電機控制方式為單向PWM控制。電機控制核心采用AT89C2051單片機,控制系統與電路用光電耦合器完全隔離以避免干擾。
本設計采用一塊單片機(AT89S52)作為智能小車的檢測和控制核心,是一種分布式控制系統的設計方法,分為電機模塊、傳感器模塊和驅動模塊三部份。小車模型采用5 V電池驅動,通過改變PWM占空比調速。小車可以在不完全確定的道路環境下,通過自我判斷,對周圍環境進行探測,并做出相應的反應,如左拐彎、右拐彎和改變速度等,還可以自動后退。目前用在機器人上的多為價格較貴的超聲波傳感器和紅外傳感器等,本設計采用價格便宜的反射式光電傳感器來完成對周圍環境的感知。
1 方案一的設計功能概述
1.1 設計概述
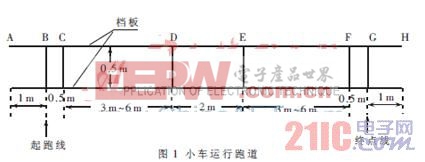
設計并制作一個能自動往返于起跑線與終點線間的小汽車。允許用玩具汽車改裝,但不能用人工遙控(包括有線和無線遙控),如圖1所示。
1.2 設計要求
(1)車輛從起跑線出發(出發前,車體不得超出起跑線),到達終點線后停留10 s,然后自動返回起跑線(允許倒車返回)。往返一次的時間應力求最短(從合上汽車電源開關開始計時)。
(2)到達終點線和返回起跑線時,停車位置離起跑線和終點線偏差應最小(以車輛中心點與終點線或起跑線中心線之間距離作為偏差的測量值)。
(3)D~E間為限速區,車輛要求以低速通過,通過時間不得少于8 s,但不允許在限速區內停車。
(4)可以設計自動記錄、顯示定時時間(記錄顯示裝置要求安裝在車上)。
(5)不允許在跑道內外區域另外設置任何標志或檢測裝置。
(6)車輛(含在車體上附加的任何裝置)外圍尺寸的限制:長度≤35 cm,寬度≤15 cm。

伺服電機相關文章:伺服電機工作原理







評論