TMS320F2812在車輛四輪轉向控制系統(tǒng)中的應用

數(shù)字信號處理器(Digital Signal Processor,簡稱DSP), 是一種適合于數(shù)字信號處理運算的微處理器,能夠實現(xiàn)實時快速的數(shù)字信號處理算法。通常,由一個以DSP為基礎的內核,配以測量控制所需的外圍功能電路,集成在單一芯片內,使芯片價格大大降低,體積縮小,結構緊湊,使用便捷,可靠性提高。因此,集成DSP芯片的多功能板是電機應用、勵磁脈沖控制系統(tǒng)、電力保護系統(tǒng)的理想選擇。本文采用了超拓工控的CS4U9813可編程智能多功能板作為伺服電機的控制器來實現(xiàn)汽車后輪轉向功能,該板集成有TI公司的高性能 DSP芯片TMS320F2812。
本文引用地址:http://www.104case.com/article/172747.htm1 TMS320F2812的結構特點[1][4]
TMS320F2812是TI公司最新推出的目前市場上最先進、功能最強大的32位定點DSP芯片。它既具有數(shù)字信號處理能力,又具有強大的事件管理能力和嵌入式控制功能,特別適用于工業(yè)自動化、電機、馬達伺服控制系統(tǒng)。TMS320F2812芯片結構采用改進的程序與數(shù)據(jù)存儲分開的哈佛結構,8級流水線作業(yè),128位的密匙保護,幾乎所有指令都在6.67ns(150MHZ)內完成,高達1MB的外部存儲器接口,最多有56個獨立的可編程、多用途的輸入 /輸出(GPIO)引腳,是實現(xiàn)運動控制系統(tǒng)的最佳選擇。功能框圖如圖1所示,其主要性能如下:
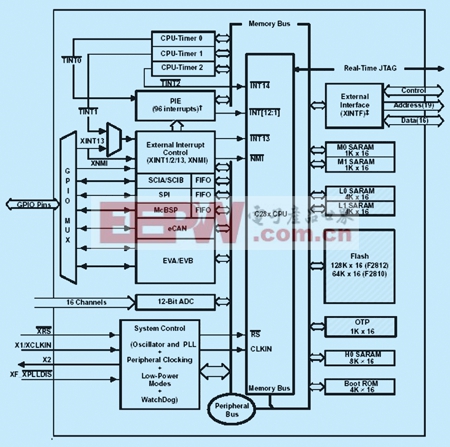
圖1 功能框圖
(1) 高性能的32位中央處理器
- 主頻150MHZ(時鐘周期6.67ns),低功耗(核心低壓1.8V,I/O口3.3V)
- 16位×16位和32位×32位乘且累加操作以及16位×16位的兩個乘且累加
- 統(tǒng)一的寄存器編程模式,可達4M字的線性程序地址和數(shù)據(jù)地址
(2) 片內存儲器
- 8Kx16位的Flash存儲器
- 1Kx16位的OTP型只讀存儲器
- L0和L1:兩塊4Kx16位的單口隨機存儲器(SARAM)
- H一塊8Kx16位的單口隨機存儲器
- M0和M1:兩塊1Kx16位的單口隨機存儲器
(3) 時鐘與系統(tǒng)控制
- 支持動態(tài)的改變鎖相環(huán)的頻率(PLL)
- 片內振蕩器
- 看門狗定時器模塊
- CPU級和外設級中斷相結合的控制系統(tǒng)
(4) 豐富的外圍設備
- 兩個事件管理器(EVA、EVB)
- 串行外圍接口(SPI)
- 兩個串行通信接口(SCI),標準的UART
- 改進的控制器局域網(wǎng)絡(ECAN)
- 多通道緩沖串行接口(MCBSP)
- 16通道12位的數(shù)模轉換器(ADC)
四輪轉向(Four-Wheel Steering,簡稱4WS) 系統(tǒng)是指車輛在轉向過程中,前后兩組四個車輪都能夠根據(jù)需要起轉向作用,能有效改善車輛的機動靈活性和操縱穩(wěn)定性,正在得到不斷發(fā)展和應用。4WS汽車在低速轉彎時,前后車輪逆相位轉向,可以減小車輛的轉彎半徑;在高速轉彎時,前后輪主要作同相位轉向,能夠減少車輛質心側偏角β,降低車輛橫擺率的穩(wěn)態(tài)超調量等,進一步提高車輛操縱穩(wěn)定性。
本文搭建的四輪轉向平臺是由一個帶有渦輪蝸桿減速機構的直流伺服電機,電磁離合器和普通的前輪轉向機構組成。其中電機電源為DC12V,減速比設定10: 1(可調),電磁離合器電源:DC48V,實驗平臺如圖2所示。控制策略采用前饋和反饋相結合的直接橫擺率閉環(huán)控制,其中由絕對式角位移傳感器采集前輪轉角信號;后輪轉角由精度較高的增量式光電編碼器得到;車速由五輪儀獲得;后輪轉向由直流伺服電機經過電磁離合器連接機械轉向機構實現(xiàn);ECU硬件電子系統(tǒng)核心由TMS320F2812構成,結構框圖如圖3所示:

圖2 實驗平臺
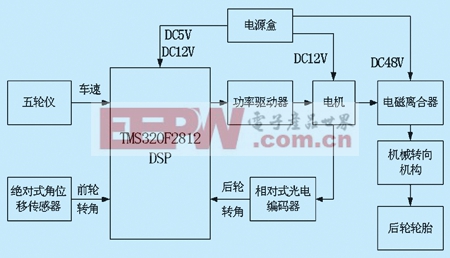
圖3 結構框圖

伺服電機相關文章:伺服電機工作原理










評論