基于AVR單片機(jī)的實(shí)驗(yàn)加載閉環(huán)控制系統(tǒng)

由于InByte()為動(dòng)態(tài)數(shù)組,其中InByte(0)=1和InByte(3)=2定為力和位移兩組數(shù)據(jù)編號(hào)。為防意外引起上/下位機(jī)數(shù)據(jù)不同步,對(duì)下位機(jī)發(fā)送到接收緩沖器的數(shù)據(jù)必須再確認(rèn):

這6個(gè)字節(jié)為兩組數(shù)據(jù):本文引用地址:http://www.104case.com/article/172627.htm
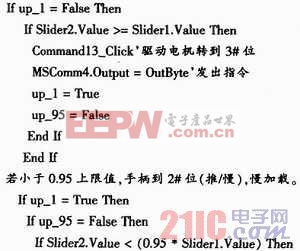
對(duì)于監(jiān)控?cái)?shù)據(jù)。若等于或大于上限值,手柄回到3#位(停/穩(wěn)壓)。為防傳感器數(shù)據(jù)在臨界點(diǎn)附近徘徊,導(dǎo)致數(shù)據(jù)不穩(wěn).編程時(shí)應(yīng)考慮跳出黏著。
利用電腦系統(tǒng)時(shí)鐘實(shí)現(xiàn)穩(wěn)壓延時(shí)功能。
3 結(jié)束語
AVR單片機(jī)的內(nèi)設(shè)10位ADC功能使得下位機(jī)的A/D變換電路設(shè)計(jì)和調(diào)試變得簡單易行。增加電橋調(diào)零電路后AMP1放大模塊才有較寬調(diào)節(jié)范圍。實(shí)際使用中由于各廠家液壓系統(tǒng)內(nèi)部構(gòu)造及制作工藝的差別,按全自動(dòng)手柄板定位控制欠佳時(shí),可由單片機(jī)I/O端口直接控制固態(tài)繼電器,繼而控制油泵電機(jī)。同樣可以獲取較好的工作效果。













評(píng)論