基于AVR單片機的電動代步車控制器

2 硬件設計
2.1 微控制器
微控制器并不是功能越豐富越好,應遵循以下2條基本原則:一是微控制器的片內資源恰好能滿足設計要求,靈活地使用片內資源可以減少外圍擴展芯片的數量,也以減小電路板的面積;二是在滿足功能的前提下,價格要盡可能的低。
本控制器采用Atmel公司的Atmgeal6(L)。該型號的單片機片內資源較為豐富,集成了EEPROM、A/D轉換器、PWM等功能模塊。EEPROM功能可以用于相關控制參數的掉電保存:PWM功能通過H橋實現對直流電機的調速控制;A/D轉換功能可以實現直流電機的電流檢測,同時也可以實現搖桿位置信息的采集。作為RISC精簡指令的高速8位單片機,和51內核的單片機相比,在相同價格基礎上具有運算速度上的優勢。
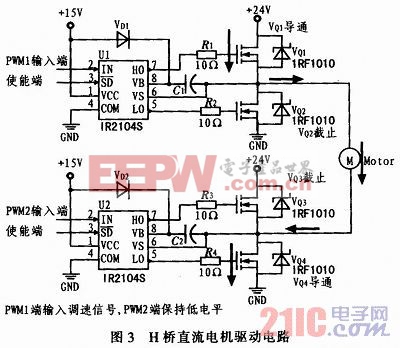
2.2 電機驅動電路
電動代步車的2個驅動后輪分別由2個直流電機帶動。直流電機由2個半橋驅動器IR2104控制的H橋功率電路進行驅動,即由4個功率MOSF-ET電路IRF1010N(VDSS=55 V,RDS(on)=11 MΩ,ID=85 A)組成電機的雙向速度控制電路,如圖3所示。當PWM2為低電平時,VQ3截止,VQ4導通,PWM1輸入調速信號,電機正轉;當PWM1為低電平時,VQ1截止,VQ2導通,PWM1輸入調速信號,電機反轉。本文引用地址:http://www.104case.com/article/172590.htm
由于電機的額定功率較大,在設計電機相關驅動電路時,應注意過載保護和功率元件的散熱問題。電動代步車通過左右電機差速運動實現各方向的運動,為了達到控制的協調性,電機的運動算法也需要通過試驗不斷修改。除此之外應考慮電機啟動或停止時的加減速過程,保證運動的平穩性。
2.3 搖桿檢測電路
搖桿是電動代步車最為重要的輸入設備,搖桿既可以控制電機電源的打開和關閉,也可以控制左右兩個電機的速度和運行方向。
控制器需要通過檢測搖桿的位置來確定電機的運行速度,搖桿實質上是一個位置傳感器,一個包含XY兩個垂直方向的位置傳感器。搖桿主要由4個位置固定的線性霍爾和4個可以移動的磁鋼組成,若搖桿被推動,磁鋼和線性霍爾的相對位置就會改變,線性霍爾的輸出電壓也跟著變化,控制器通過A/D轉換器測量這4個電壓值,以確定搖桿的位置。
線性霍爾的靈敏度越高,其輸出電壓值范圍越寬,搖桿位置的分辨率也就越高,電動代步車的操縱性能也就越好,所以線性霍爾的選擇非常重要。本控制器采用Honeywell的SS490系列線性霍爾,其靈敏度可達3.125 mV/G,可以滿足要求。













評論