基于凌陽16位單片機的智能車設(shè)計

軟件程序由主程序、尋跡模塊程序、避障模塊程序、避障語音播報程序和LED顯示車體轉(zhuǎn)向程序等幾部分組成。圖6、圖7即為主程序和尋跡程序流程。
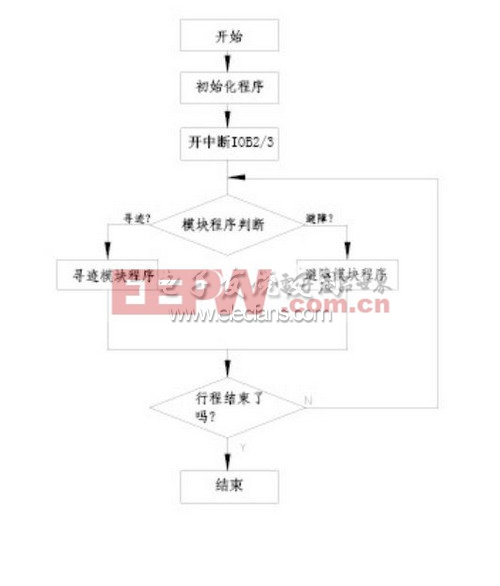
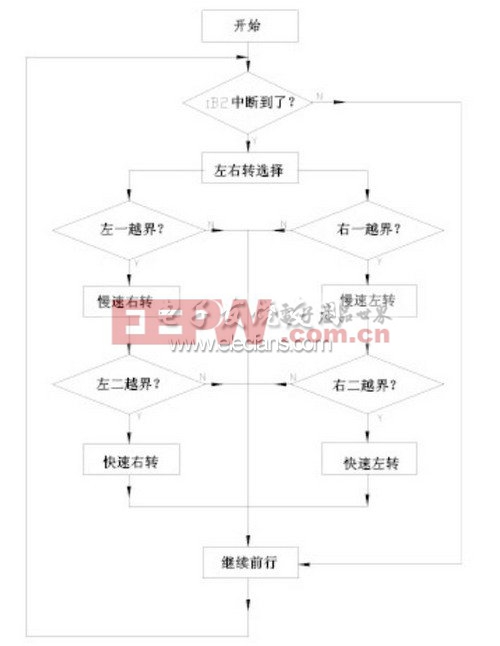
圖6 主程序流程圖 圖7 尋跡程序流程圖
PWM算法的實現(xiàn)
凌陽SPCE061A單片機提供了兩個16位定時器,分別有相應(yīng)的定時器控制寄存器設(shè)計相關(guān)參數(shù),P_TimerA_Ctrl(700BH)和P_TimerB_Ctrl(700DH)的第6~9位設(shè)置該定時器輸出不同頻率的脈寬調(diào)制信號。
智能車實地調(diào)試
小車的實際調(diào)試是讓小車運行在一個指定或任意給定的由紙板構(gòu)成的迷宮通道,通道設(shè)有兩個進出入口。開始測試時將小車放置在入口處并打開小車電源,小車可以順利地在迷宮內(nèi)實現(xiàn)躲避障礙,最后從迷宮的另一個出口出來。循跡的測試是在一張空曠的貼有一定黑線軌跡的桌子上進行,測試結(jié)果顯示,小車可以按照比賽的要求進行循跡、轉(zhuǎn)向和避懸崖。
結(jié)語
本次設(shè)計的智能車是機電一體化的綜合產(chǎn)品。循跡模塊能實現(xiàn)尋黑線車體的自由運轉(zhuǎn)。小車可以順利地完成拐直角彎道或者掉頭返回(180°轉(zhuǎn)彎)等操作。












評論