基于單片機的智能救援機器人小車設計

3 電源模塊
救援小車整體采用可充電蓄電池供電。由于微控制器、攝像頭以及電機的工作電壓是不同的,我們準備了兩套解決方案:一是使用模擬電路進行穩壓;二是使用專門的集成穩壓芯片。通過實際操作以及比較,最終選擇了第二種方案。其主要優點是:a.外圍電路簡單,只需簡單的濾波即可;b.可提供穩定的輸出電壓;c.制作簡單、成本低。供電系統框圖如圖2所示。本文引用地址:http://www.104case.com/article/172500.htm

由于攝像頭需要一個9~12V的電壓才能正常工作,而充電電池的電壓只有6~7.2V。所以DC-DC升壓電路便成為必需。DC-DC電壓變換采用MC34063A集成電路,該器件內部集成了溫度補償器、比較器、動態電流帶限占空比可控的振蕩器和一個高電流輸出驅動器。
4 電機驅動模塊
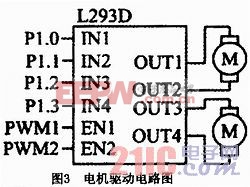
驅動機器人行走的兩個電機需要不同的轉速來實現轉彎。選用的驅動芯片為L293D,它包含4個輸出通道,最大輸出峰值電流為12A,能同時驅動兩個直流電機工作;其信號輸入端和使能端接收到來自單片機的信號,控制電機的通斷以及正、反轉,還可以通過向使能端輸入不
同占空比的方波信號來調整電機轉速(PWM方式)。如圖3所示,IN端口接控制信號,OUT端口接電機的兩端,EN端口接使能信號。一組IN端口輸入為高/低或低/高電平時,能實現電機的正/反轉。一組IN端口輸入均為高或低電平時,電機將停轉。EN使能端為高電平時,相應端口輸入信號有效;反之,則輸入信號無效。在EN端輸入PWM波,通過調整PWM波的占空比,即可實現電機的無級調速。











評論