步進(jìn)電機(jī)細(xì)分控制原理

步進(jìn)電機(jī)控制已經(jīng)蘊(yùn)含了細(xì)分的原理。電機(jī)內(nèi)部磁場(chǎng)每旋轉(zhuǎn)一個(gè)圓周, 步進(jìn)電機(jī)前進(jìn)一整個(gè)步距角。若四相步進(jìn)電機(jī)按A→B→C→D→A 的順序輪流通電, 即整步工作, 磁場(chǎng)分四拍旋轉(zhuǎn), 每次電流換向, 步進(jìn)電機(jī)將前進(jìn)整步距角的1/4。而按A→AB→B→BC→C→CD→D→DA→A 的順序輪流通電, 即半步工作, 每次電流換向, 步進(jìn)電機(jī)將前進(jìn)整步距角的1/8。
本文引用地址:http://www.104case.com/article/172410.htm但是, 如果半步工作狀態(tài)下每拍前進(jìn)的角度超過(guò)控制精度要求, 則需要對(duì)步距角進(jìn)行更進(jìn)一步的細(xì)分。我們知道, 電磁力的大小跟繞組通電電流的大小是相關(guān)的。當(dāng)通電相的電流不馬上到達(dá)峰值, 而斷電相的電流也不立
即降為零時(shí), 電機(jī)內(nèi)部磁場(chǎng)為上兩相電流共同合成, 而產(chǎn)生的磁場(chǎng)合力, 會(huì)使轉(zhuǎn)子有一個(gè)新的平衡位置, 這個(gè)新的平衡位置在原步距角的范圍內(nèi)。也就是說(shuō), 如果繞組電流的波形不再是一個(gè)近似方波, 而是分成N 個(gè)階梯的近似階梯波, 則電流每升或者降一個(gè)階梯時(shí), 轉(zhuǎn)子轉(zhuǎn)動(dòng)一小步。當(dāng)轉(zhuǎn)子按照這個(gè)規(guī)律轉(zhuǎn)過(guò)N 小步時(shí), 實(shí)際相當(dāng)于它轉(zhuǎn)過(guò)一個(gè)步距角。這種將一個(gè)步距角分成若干小步的驅(qū)動(dòng)方法, 稱為細(xì)分驅(qū)動(dòng)。

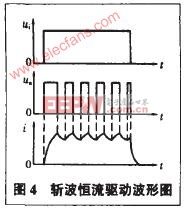
如圖3: T1 是一個(gè)高頻開關(guān)管。T2 管的發(fā)射極接一個(gè)電流取樣小電阻R。比較器一端接給定電壓uc, 另一端接R 上的壓降。控制脈沖ui 為低電平時(shí), T1 和T2 均截止。當(dāng)ui 為高電平時(shí), T1 和T2 均導(dǎo)通, 電源向電機(jī)供電。由于繞組電感的作用, R 上電壓逐漸升高, 當(dāng)超過(guò)給定電壓uc, 比較器輸出低電平, 與
門因此輸出低電平, T1 截止, 電源被切斷, 繞組電感放電。當(dāng)取樣電阻上的電壓小于給定電壓時(shí), 比較器又輸出高電平, 與門輸出高電平, T1 又導(dǎo)通, 電源又開始向繞組供電, 這樣反復(fù)循環(huán), 直到ui 又為低電平。因此: T2 每導(dǎo)通一次, T1 導(dǎo)通多次, 繞組的電流波形為鋸齒形, 如圖4 所示, 在T2 導(dǎo)通的時(shí)間里電源是脈沖式供電( 圖4 中ua 波形) , 所以提高了電源效率, 而且還能有效抑制共振。








評(píng)論