基于分布式控制系統的輪式智能機器人研究

0 引言
本文引用地址:http://www.104case.com/article/172189.htm智能機器人研究在當前機器人研究領域具有十分突出的地位,其顯著的特點是具有環境感知、判斷決策、人機交互等功能。具體地說,應該具有可移動性,能根據命令或需要到達指定工作地點或區域;應具有圖像識別能力,可進行人臉識別、物件識別、視覺導航;具有語音識別與合成功能,可進行人機語音交互,包括用語音命令控制機器人工作、人機語音對話聊天、媒體(視頻、音頻)語音點播、語音信息查詢、文本語音播放等;具有超聲波測距與避障功能;具有軌跡跟蹤功能;具有測光與光源跟蹤功能等。這些功能要求控制系統應具有較好的協調性、實時性和可靠性。針對智能機器人的上述功能特性,我們設計并實現了基于分布式控制系統的輪式智能機器人。
智能機器人的控制對象及功能較多,比較理想的控制系統解決方案是采用分布式控制系統(Distributed Control System,DCS),將控制功能在下位機分散,每個下位機完成一項特定功能,各下位機便可實現并行工作,這將大大提高整個系統的處理速度和能力。 DCS的核心思想是集中管理、分散控制[1],即管理與控制分離,上位機用于集中監視管理功能,下位機分散到現場實現分布式控制,各上下位機之間通過控制網絡互連以實現信息傳輸。顯然,采用DCS方案有如下明顯優點:實現集中監控和管理,管理與現場分離,管理更能綜合化和系統化;實現分散控制,可使各功能模塊的設計、裝配、調試、維護獨立,系統控制的危險性分散,可靠性提高,投資減小;采用網絡通信技術,可根據需要增加以微處理器為核心的功能模塊,具有良好的系統開放性、擴展性和升級特性。
CAN(Controller Area Network)總線[2]作為連接各上下位機之間的通信網絡,非常適用于分布式控制系統,因為它具有許多優點:CAN控制器工作于多主方式,網絡中的各節點都可根據總線訪問優先權向總線發送數據,通信方式靈活;CAN節點在錯誤嚴重的情況下具有自動關閉輸出功能,以使總線上其他節點的操作不受影響,因而具有突出的可靠性;CAN總線的通信協議可由CAN控制器芯片及其接口芯片來實現,從而大大降低系統開發難度,縮短了開發周期;CAN總線結構簡單,只有兩根信號線,掛接在總線上的設備可方便地增減,因而具有優良的擴展性;此外,CAN總線還有傳輸速率高、實時性強、開放性好、成本低等特點。
2 控制系統的結構
基于CAN總線的分布式控制系統的上位機由主控計算機及所屬的語音和圖像處理單元構成,下位機則是由以1至5號單片機為核心的功能模塊所組成,它們分別是移動平臺伺服控制器模塊、測距控制器模塊、尋跡控制器模塊、測光控制器模塊、系統監控與電源管理模塊,控制系統結構圖如圖1所示。
由圖可見,這是一個典型的分布式控制系統結構。各功能模塊單元電路在邏輯上相對獨立,每個模塊都是一個以自己的處理器(單片機)為核心的功能完整的子系統,且完成一項特定的功能,各單元均通過CAN控制器和CAN驅動器與CAN總線相連,實現與上位機及其它功能模塊之間的信息傳輸。系統監控與電源管理模塊除和CAN總線相連外,還有一組狀態線和控制線分別與其它各功能模塊相連,一方面,該功能模塊要通過狀態線實時監測其它功能電路的工作狀態,另一方面,還要根據主控計算機的控制決策或突發事件(如電路故障報警)通過控制線對相應電路模塊進行實時控制(系統復位、切斷或接通電源等),以完成系統監控功能。
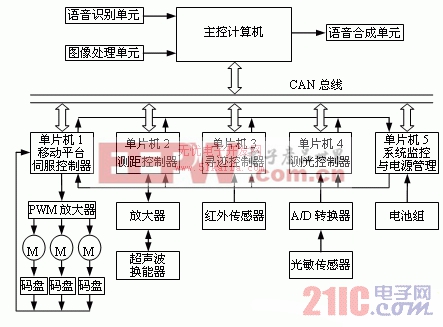
圖1 控制系統結構圖
3 智能機器人的結構及功能模塊
3.1 主控計算機
主控計算機是分布式控制系統的上位機,主要用于人機語音交互、系統管理、控制決策、任務調度、圖像識別與處理等。主控計算機軟硬件結構圖如圖2所示。
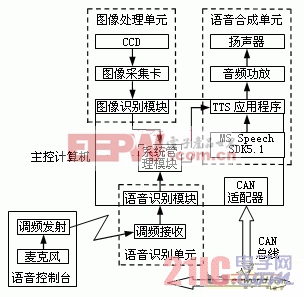
圖2 主控計算機軟硬件結構圖
功能完善的語音識別與合成、圖像處理等系統往往比較龐大,需要操作系統和其它相關軟件資源作支撐,又由于這些信息的處理運算量大,因此,這幾項功能的實現以及分布式控制系統中的主控計算機須由一臺高性能PC機承擔。故上位機不僅具備系統管理、控制決策及任務調度等功能,還同相關設備或部件(CCD、圖像采集卡、聲卡、音頻功放、調頻發射與接收機等)一起組成語音識別單元、圖像識別單元、語音合成單元等功能單元。
3.1.1 語音控制臺
人是機器人的最高決策者和命令下達者,對我們設計的這款機器人下達任何命令均通過語音控制臺(手持式微型無線調頻話筒)以語音方式實現。這種方式降低了人對機器人的操控難度,使之變得友好、自然,實現了真正意義下的人機對話。
3.1.2 語音識別單元
語音識別是本機器人的關鍵技術之一。針對不同的應用目的和平臺,語音識別有多種實現途徑,如用于語音玩具的只能識別較少數量孤立單詞的簡易專用語音識別芯片;面向嵌入式系統或設備,對系統資源要求不高的基于DSP或其它MCU的語音識別模塊;支持多服務器和分布式語音識別的解決方案;基于PC環境的語音識別系統等。
由于語音識別是人機交互的關鍵,因此,本系統宜采用面向PC平臺、功能強大、性能優異的具有連續語音識別能力的軟件,如比較成熟的IBM ViaVoice SDK,以及中科院自動化所推出的基于PC平臺的Pattek ASR/P2.0 SDK,這兩個產品都具有許多共同特點,如識別率高,對環境噪聲和口音的適應能力強;具有非特定人語音識別功能,適合不同性別和口音的普通話;接口豐富,便于二次開發,可有效縮短開發周期;抗干擾能力強;詞表替換方便,且不需要重新采集語音數據訓練模型等。
3.1.3 圖像處理單元
本智能機器人的圖像處理單元可實現人臉識別、物件識別與視覺導航。機器人視覺是近年來人工智能研究的活躍課題,也是我們本次機器人研究的重要子課題。一個優秀的人臉及物件目標自動識別系統應具有訓練時間短,識別速度快,識別準確率高等特點,因此,算法的研究通常基于這幾個特點展開。典型的KL算法在提取圖像的代數特征方面,其效率和速度均有待提高,且得到的特征向量的可分性也不好;雖然統計不相關最佳鑒別變換擁有很好的分類效果,但如果直接利用圖像向量構造圖像散布矩陣運算量又會太大,導致識別速度降低。
在經典代數特征提取方法基礎上,我們設計并實現了基于KL和統計不相關最佳鑒別變換的人臉及物件識別算法,較好地解決了運算量和識別速度、識別準確率之間的矛盾。實際應用表明,這套人臉及物件自動識別系統具有性能穩定可靠、識別速度快、識別準確率高等優點。
我們將改進后的算法在計算機上實現,并使用最小距離分類器進行識別測試,最終結果表明:訓練時間明顯減少,訓練200幅圖像的時間小于80秒,訓練全部400幅圖像的時間小于480秒;識別速度均在1秒之內,有較大提高;識別正確率提高,平均正確識別率明顯高于單獨的KL和統計不相關最佳鑒別變換方法,可達92%以上。
圖像處理單元還有一個重要功能,即用于視覺導航。視覺導航是近年來發展起來的一種先進導航技術,然而,視覺導航是一個十分具有挑戰性的復雜課題,實現該項技術具有很高的難度。其中一種方案是視覺導航系統通過識別路徑引導線或標志信息為機器人提供視覺導航,在這種方案中,路徑識別是視覺導航的關鍵。具體思路是:系統通過邊緣檢測法檢測路徑引導線,并計算自身相對于引導路徑的位姿值,從而進行導航控制。
3.1.4 語音合成單元
要實現人機語音交互,機器人除應具備能聽懂人的自然語言的語音識別系統(Speech Recognition,SR)外,還應具備能開口說話的語音合成系統(Speech Synthesis,SS)。TTS(Text-to-Speech)即文語轉換,是將文字信息轉換成語音的一種技術。實現TTS的核心技術很復雜,然而,為幫助軟件開發者開發語音軟件,微軟公司提供了支持中文文本的識別和合成語音引擎Microsoft Speech SDK 5.1,利用該引擎,我們可輕松實現TTS,創建具有TTS功能的應用程序。
3.2 移動平臺伺服控制器
本輪式機器人由輪式移動平臺和平臺上的機器人頭部組成。機器人頭部安裝有一部帶有控制云臺的攝像機、一對全頻音箱、4個超聲波傳感器、8只光敏傳感器等零部件,而主控計算機、各功能模塊電路板、電池組、調頻接收機、音頻放大器、紅外光電傳感器等零部件則安裝在移動平臺上。輪式移動平臺采用3組正交輪驅動,具有3個自由度,可實現仿人靈活移動。如圖1所示,由移動平臺伺服控制器、PWM放大器、驅動電機和增量式光電碼盤構成速度閉環控制。
3.3 測距控制器
在機器人頭部裝有4個超聲波傳感器,用于檢測四個方向的障礙物信息,以實現測距與避障功能。傳感器的有效檢測距離在0.3m至5m之間,誤差小于5cm。
3.4 尋跡控制器
5只用于尋跡的紅外光電傳感器置于機器人正前方,方向朝下,呈對稱分布,用于檢測地面的路線軌跡。
本機器人有多種導航方式。第一種是在其運動路徑上設置導航信息媒體,由傳感器檢測導航信息的特性,控制機器人按規定的路線行駛的外導式[3],本機器人利用CCD進行路徑識別的視覺導航、利用紅外光電傳感器檢測地面的路線軌跡進行導航、利用超聲波傳感器進行的導航、利用光敏傳感器進行的導航等導航方式均屬于外導式。第二種是內導式,即按運動規劃或預先設定的運動路徑行駛的導航方式。
3.5 測光控制器
安裝在機器人頭部,彼此呈45度角的8只光敏傳感器,連同對應的8路A/D轉換器和測光控制器,構成測光單元,用于檢測或追蹤光源。在光敏傳感器和測光控制器之間加入A/D轉換器,可精確檢測不同方位的光強度。
3.6 系統監控與電源管理
系統監控與電源管理模塊負責對整個控制系統的工作狀態實施監控和管理。該模塊具備以下功能:當某一電路或功能模塊發生故障時,由該模塊向主控計算機和其它模塊發出報警信息,并將該模塊復位,復位后若故障消失,則解除警報,否則關閉該模塊,并通知其它電路停止與該模塊通信;實時監控系統工作狀態,當某些功能電路暫不工作時,關閉其電源,以節約機載電能。
4 結語
該智能機器人經反復實驗,已基本達到預期效果,大部分功能已經實現。其中,語音識別與控制、語音合成、超聲波測距控制、采用紅外光電傳感器的尋跡與控制、測光與追光、人臉識別、移動平臺的伺服控制等均取得較好效果,但物件識別的對象有一定限制,視覺導航仍有大量工作尚待完成,作為“智能機器人”的整體智能化程度有待進一步提高。
本文作者創新點:提出了一種基于分布式控制系統,具有包括圖像處理(人臉識別與物件識別、視覺導航)、語音處理(語音識別與合成)在內的較高智能化程度的機器人控制系統結構;設計并實現了基于KL和統計不相關最佳鑒別變換的人臉及物件識別新算法,較好地解決了運算量和識別速度、識別準確率之間的矛盾,有效提高了識別速度和準確率;提出并實踐了一種包括視覺導航、語音導航、尋線導航、超聲波導航、光電導航以及運動規劃導航等在內的綜合策略導航方式。實踐證明,采用該方案后,智能機器人系統具有較好的可靠性、開放性和魯棒性。
參考文獻:
[1] 王常力,羅安.分布式控制系統(DCS)設計與應用實例[M].北京:電子工業出版社,2004.
[2] 呂當俠.CAN總線的特點及應用.航空與航天[J],2005(3):16-20.
[3] 譚定忠等.室內移動機器人定位方法的研究.機械與電子[J],2005(9):46-47.
[4] Zhong Jin,J Y Yang,Z S Hu et al.Face Recognition based on uncorrelated discriminant transformation[J].
Pattern Recognition,2001,33(7):1405-1416.
[5] Microsoft, Microsoft Speech SDK 5.1 Documentation,
[6] 韓大鵬,韋慶.機器人控制器的一種模塊化設計方法.微計算機信息[J],2005,21(5):3-4.














評論