機器人常用的單片機使用經驗

七 新興控制器 FPGA
1簡介
FPGA(Field-Programmable Gate Array),即現場可編程門陣列,它是在PAL、GAL、CPLD等可編程器件的基礎上進一步發展的產物。它是作為專用集成電路(ASIC)領域中的一種半定制電路而出現的,系統設計師可以根據需要通過可編輯的連接把FPGA內部的邏輯塊連接起來,就好像一個電路試驗板被放在了一個芯片里。簡單說,如果使用者想開發一個用簡單數字邏輯電路就能控制的小車,又嫌搭電路麻煩,他就可用軟件給一個FPGA編程讓它實現數字電路功能去控制小車。即FPGA可被用來模擬各種電路。有的FPGA甚至能模擬51單片機的運行。因FPGA通過編程即可修改它模擬的電路結構,因此在系統實驗、調試中很方便,很多愛好者嘗試用FPGA做機器人控制器。
八 更多可供選擇的單片機
我們選擇學一款單片機前首先要考慮自己面對的實際任務需要什么性能的單片機,然后在眾多性能滿足要求的單片機中作出選擇。此時我們還要考慮不同單片機的“應用廣泛程度”,比方說:當我們要做一個電子大賽智能小車,有AVR單片機和PIC單片機可滿足任務需要,如何在兩者中作出選擇需要考慮哪種單片機學起來比較容易、學習資料容易獲取、可供參考的程序和案例更加豐富、哪種單片機更容易獲得編程軟件和下載器等。筆者感覺要想做智能小車,AVR單片機的資料比較豐富。
世界上有種類繁多的單片機,它們當中絕大多數都可用來控制機器人,但存在一個是否合適的問題。比如PLC是可編程控制器,當然可以用來控制愛好者手中的機器人,但PLC多用于工業控制領域,設備龐大價格昂貴,同時不易獲得用PLC控制小型機器人的資料。愛好者選擇學一種單片機前,首先得明確自己要用單片機干什么,然后再選最合適的單片機學習。學單片機重在學精一兩種單片機,如果有人泛泛地學ARM、PLC、PIC、凌陽、DSP、FPGA等所有有名的單片機,那么他將無法擁有真正的深度開發能力。所謂深度開發,以AVR單片機為例,初學者可以用它實現小燈交替閃爍,中級技術人員可以用它控制參加比賽的機器人,而真正的高級開發人員可以用AVR實現機器視覺、無人機自動駕駛、坦克火控系統……
AVR單片機過時了嗎?
有初學者甚至中級開發人員認為因ARM性能一般比AVR性能高,因此ARM將代替AVR,AVR將退出歷史舞臺,或者MSP430將代替51系列單片機,或者FPGA將取代所有單片機等。這種看法不對,因為不同單片機都有各自的特點和優點,沒有哪種單片機是完美的,在不同場合用最合適的單片機,發揮它們各自的特長,而不存在ARM一統天下,取代所有其他型號單片機的可能性。試想,原本十幾元的電子表因為采用ARM控制買到幾百元,誰能受得了?因此不要覺得AVR已經過時,學完51就直接學ARM,或者覺得學51沒用,直接學ARM,否則你將碰壁。
MSP430系列單片機:比較適于機器人開發,是美國德州儀器推向市場的一種16位、具有精簡指令集的、超低功耗的混合信號處理器。具有Flash存儲器,中斷源較多,并且可以任意嵌套,使用時靈活方便。MSP430系列單片機的電源電壓采用的是 1.8~3.6V 電壓。因而可使其在1MHz的時鐘條件下運行時,芯片的電流會在200~400uA左右,時鐘關斷模式的最低功耗只有0.1uA。MSP430系列單片機的各成員都集成了較豐富的片內外設。它們分別是看門狗、模擬比較器、定時器、串口0、1、硬件乘法器、液晶驅動器、10位/12位ADC、16位Sigma-Delta AD、直接尋址模塊(DMA)、IO端口、基本定時器(Basic Timer)等的一些外圍模塊的不同組合。MSP430 系列單片機引進了JTAG技術,不僅使開發工具變得簡便,而且價格也相對低廉,并且還可以實現在線編程。
PIC單片機:可用于機器人開發,是8位單片機,產品種類豐富,采用精簡指令集,有不錯的開發環境,引腳驅動能力強,可直接連接繼電器控制強電。自帶看門狗,有睡眠和低功耗模式。很多性能不如AVR和MSP430系列單片機,但因其有特殊優點,也被廣泛應用。
凌陽單片機:比較適于機器人開發,以16位計算機為核心,集成不同規模的RAM、ROM和其他豐富的功能電路,使用者可以根據自己需要選擇集成了特定功能電路的凌陽單片機。凌陽單片機指令系統提供出具有較高運算速度的16位,16位的乘法運算指令和內積運算指令,為其應用添加了DSP功能,因此凌陽適合進行語音識別。在我國凌陽單片機在學校比較常見,應用實例較多,可作為機器人愛好者選用的單片機。本文引用地址:http://www.104case.com/article/171763.htm
九 實例:用AVR單片機創造機器生命
1 什么是機器生命
機器生命就是一個能自主生存的機器,一個自動為生存下去而奮斗的機器。對于機器生命來說,生存的含義就是不斷電,繼續運行。機器生命具有完全自主決策、自主行動、活動于未知世界、不需人類參與就能持續運行并且自我維護等特征。影片《終結者》中的天網就是超級機器生命。《霹靂5號》描述了一個機器人從無生命到有生命的過程。
N.維納(Norbert Wiener,1894~1964)寫《控制論》時創造出第一個機器生命Wiener龜,這個機器龜僅有2個電子管組成的模擬計算機,但它卻能實現真正的烏龜覓食、睡覺、探索、逃避等行為,其表現如同一個有生命的生物一樣。機器龜上面有太陽能電池,當自身電池快用完前,機器龜樂于尋找一個光線充足的地方充電,充滿電后可能找個地方睡懶覺,或者探索未知世界,它有避免碰撞和避免到傾斜地方的趨向,我們無法預知它的行蹤,因為它不是按照程序運行的,就如同我們自己一樣。后來維納在他的機器龜上又加了一個電子管,三個電子管連接成簡單的神經網絡,通過對機器龜訓練,維納通過搖鈴可控制機器龜的行為。正如有生物學家訓練狗使得狗聽到搖鈴聲后就流口水。
2 我們可以自己動手做一個機器寵物
我們今天有先進的單片機,制作一個更好的機器生命其實不難。機器生命遠比按固定程序運行的機器人好玩,就如同寵物狗比玩具狗好玩一樣。我們設想的機器生命可以是一個小型履帶式機器人,帶有太陽能板,能感受光線強弱,障礙物距離和碰撞,為了實現人機互動,該機器生命具有語音識別功能。試想你學習一天,回到寢室,叫一聲TONY,你的機器寵物轉身飛快跑向你,那種感覺只有寵物的創造者才能體會……
3 如何實現?如何設計電路?如何設計結構?
這個機器生命方案采用ATmega16單片機做控制器,單片機的8路AD通道和其余24個IO接口都被使用。AVR單片機AD轉換頻率高于音頻,可以用來進行簡單的語音采集。機器生命的程序較復雜,而AVR單片機適合進行快速復雜運算。本設計的電路板上除了ATmega16單片機外,還有2個LG9110電機驅動芯片、2個LM386音頻功放芯片,和LM393電壓比較器芯片,再加上少量電阻電容和三極管,電路簡潔,適合初學者和中級愛好者動手制作。
LCD采用通用1602模塊,支持3位控制線4位數據線,如果你采用IO口復用技術,可用6條線控制LCD模塊。
此方案涉及光電檢測、自動充電、語音識別、超聲波測距、鍵盤(4個碰撞開關)、LCD液晶顯示、電機驅動等技術,這些都是動手做簡單機器人的基本技術,如果愛好者能把這個機器生命做好,那么你的電路設計、調試經驗和編程能力都會有很大的提高。
這個機器生命的技術含量相當于20世紀70年代國際機器人領域的先進水平。當時已經有很多非常精密和復雜的工業機器人被應用,但這種簡單的機器人怎么能稱作先進呢?因為技術的復雜和技術的先進不是一個概念,復雜+精密不一定等于先進。先進的東西不一定復雜和精密。
A 尋光
我們可以用光電二極管來檢測光線強弱。當然也可以用光敏電阻。將光敏電阻和一個固定電阻串聯接在電源正負極之間,光敏電阻靠近正極一側。從光敏電阻和固定電阻連接點引出導線接到ATmega16的AD轉換輸入口。當強光照在光敏電阻時,光敏電阻阻值變小,因此其壓降變小,而固定電阻分壓增多,引出的AD檢測電位升高,被單片機轉化為數字量后判斷光線增強。機器生命有5個光電傳感器,其中4個面向機器人前后左右四個方向,另一個指向太陽能板所面對的方向。通過編程可以讓機器人自主移動到光線最強的地方。
B 充電
本設計采用4.8V鎳氫充電電池為系統供電。太陽能電池板正負極通過一個三極管與電池正負極相連。有一個電壓比較器比較電池電壓與太陽能板的壓差,如果壓差高于某值,比較器控制三極管導通,太陽能電池板對充電電池充電。充電電池電壓上升,當高于某值時控制三極管關斷,結束充電。為使太陽能板能對電池組充電,要求太陽能板在陽光直射下輸出電壓高于8V。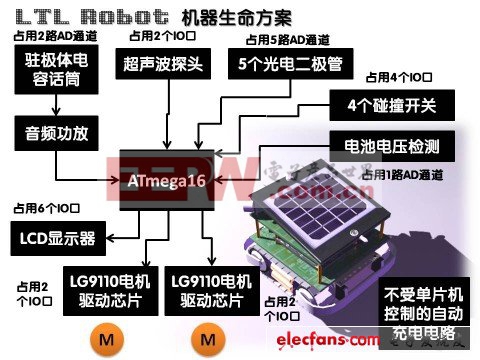
C 語音識別
用AVR單片機的高速AD檢測功能能實現簡單的語音識別。聲音信號被駐極體電容話筒接收后送至LM386音頻功放芯片放大和過濾后送至單片機AD轉換口,單片機對音頻信號幅值采樣轉化為一組數字,然后對這組進行取方差運算,得出一個特征值,該特征值可以用于簡單的語音識別。比如你發一個“e”,方差應該比較小,如果你發“p”爆破音,方差應該較大。當然,如果你用更復雜的數據處理,會得到更好的識別效果。本設計使用了2路聲音信號,目的是讓單片機判斷出聲源的大體方位。
D 超聲波測距
用AVR的1個IO口輸出40KHz信號送至超聲波發射電路,當超聲波遇到障礙物返回后,被超聲波接收頭接收,信號經CX20106A解碼芯片處理,得到一個低電平脈沖,用該脈沖引發AVR單片機中斷,AVR通過檢查發波和收到回波之間的時間差即可算出障礙物距離。
E 電機驅動
本設計采用2片LG9110電機驅動芯片驅動兩臺直流減速電機。LG9110輸出最大電流為800mA,僅需要2條控制線與單片機IO口直接相連即可控制一臺電機正反轉或者停止。LG9110僅有8個引腳,使用非常方便。
F 讓機器生命更聰明
我的這個機器生命設計方案能實現最酷的效果是:白天,陽光明媚,機器生命跑到陽光底下曬太陽,太陽光會隨著時間變化,機器生命能自動跑到最合適的位置享受日光浴。到了晚上,機器生命會找個安靜的地方閉目養神,等待明天太陽升起。你可以訓練機器生命,讓它知道自己的名字叫什么。比如你叫著它的名字,同時站在它面前用強光照射它的太陽能電池板,如此反復訓練,會使機器生命聽到自己名字后向聲源方向跑去,在距離聲源一定遠處停止,因為以往這樣做它都能享受強光照射并充電。這就如同真正的寵物狗,你叫它名字它就跑到你跟前希望能獲得食物。這一切都是完全能夠實現的,關鍵就在于編程序實現它。
G 想象無極限,你的機器寵物將無所不能
以上方案中,ATmega16的功能被發揮到極致,以至于沒有空閑的IO口,系統不能再擴展了。如果你用ATmega128單片機做,那么它擁有53個IO口,30多個中斷,128Kb的程序存儲器,4Kb的RAM,使得你能編寫更復雜的程序、儲存更多的動態數據、連接更多的外設,你的機器生命將變得非常有生命力。比如加入三軸加速度傳感器、地磁傳感器、GPS定位、雨水傳感器甚至攝像頭、無線通信模塊等,重新設計一個堅固和強勁的底盤,你的機器生命就可以在室外自由探索了。
以上芯片外設來源說明:在淘寶上購買很容易
底盤:340元的高級履帶式1:16電動坦克模型
加速度傳感器、地磁傳感器:美國AD公司的40元ADXL330加速度傳感器
GPS定位:幾十元的車載外置GPS天線
最后,我想說,機器人是非常好玩的,只要你有想象力,有毅力,努力研究實踐就能創造奇跡。

手機電池相關文章:手機電池修復
51單片機相關文章:51單片機教程
單片機相關文章:單片機教程
單片機相關文章:單片機視頻教程
單片機相關文章:單片機工作原理







評論