單片機(jī)系統(tǒng)多串行口設(shè)計(jì)技術(shù)

以上八種多串口的設(shè)計(jì)方法可以歸納為五種設(shè)計(jì)思想:
②挖掘器件本身的資源,在CPU I/O口線上用軟件模擬串行口;
③使用功能電路實(shí)現(xiàn)串、并轉(zhuǎn)換;
④使用功能電路將一路高速串行口分解為多路低速串行口;
⑤通過分時(shí)復(fù)用實(shí)現(xiàn)一路到多路的切換。
針對(duì)這幾種不同的設(shè)計(jì)思想和其具體的實(shí)現(xiàn)方法,在應(yīng)用時(shí)該如何選擇,不但要依據(jù)以上幾種方法的軟硬件復(fù)雜度、CPU時(shí)間開銷、實(shí)時(shí)性和可靠性,還要依據(jù)應(yīng)用系統(tǒng)中所需串行接口的總路數(shù)、各個(gè)串口之間的獨(dú)立性和波特率,以及現(xiàn)有的開發(fā)條件和綜合成本指標(biāo)。選擇時(shí)要根據(jù)各種因素進(jìn)行綜合權(quán)衡。要在能實(shí)現(xiàn)所要求功能的基礎(chǔ)上,充分利用現(xiàn)有資源、降低系統(tǒng)的復(fù)雜度、提高可靠性,力求使設(shè)計(jì)代價(jià)最小、總體成本最低。當(dāng)然,這些方法的選擇應(yīng)該靈活多樣,不必拘泥于一種方法,也可以因地制宜地選擇幾種方法的組合。
4 應(yīng)用舉例
在某型無人機(jī)飛行控制器設(shè)計(jì)中,CPU選用的是80C196KC。CPU上原有的一路串口用于遙控遙測(cè)。為了測(cè)量飛機(jī)的航向角。系統(tǒng)中應(yīng)用了數(shù)字羅盤HMR3000。該傳感器為串口接口,波特率為19200,輸出數(shù)據(jù)為NMEAC183格式,每秒20幀,每幀35字節(jié),為此需要給控制器增加一路全雙工異步串行接口。
基于對(duì)以上8種設(shè)計(jì)方法的比較與分析,在權(quán)衡系統(tǒng)的軟硬件復(fù)雜度之后,選用了第四種方法,即利用16C550可編程通訊控制器擴(kuò)展出一路串行口。專門與該傳感器通訊。16C550使用了FIFO功能,在接收14個(gè)字節(jié)后向CPU提出一次中斷請(qǐng)求。這樣CPU最多中斷4次就可以全部接收一幀姿態(tài)測(cè)量數(shù)據(jù)。控制器的軟件對(duì)HMR3000一幀輸出數(shù)據(jù)的解碼時(shí)間僅為1.187ms,CPU的負(fù)擔(dān)并不大。CPU、16C550和HMR3000的連接電路如圖1所示。
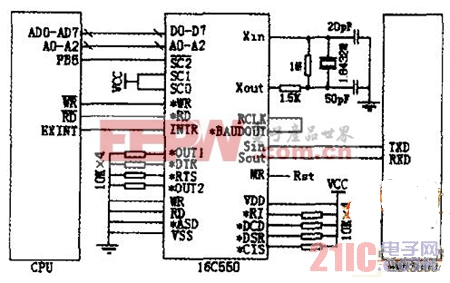
圖1 可編程通訊控制器16C550與單片機(jī)系統(tǒng)的接口電路圖











評(píng)論