一種新型電子機(jī)械鎖的設(shè)計(jì)

2.2 指紋識(shí)別模塊的通信協(xié)議
指紋識(shí)別模塊作為從設(shè)備,通過串口,由主芯片ATmega162發(fā)送相關(guān)命令對(duì)其進(jìn)行控制。
命令接口:19200b/s 1起始位1停止位(無校驗(yàn)位)。
主芯片發(fā)送的命令及指紋模塊的應(yīng)答數(shù)據(jù)長(zhǎng)度為8 B,數(shù)據(jù)格式如下:
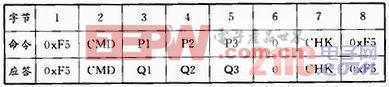
CMD:命令/應(yīng)答類型;P1.P2,P3:命令參數(shù);Q1,Q2,Q3:應(yīng)答參數(shù);CHK:校驗(yàn)和,為第2字節(jié)到第6字節(jié)的異或值;Q3用于返回操作的有效性信息,表示操作是否成功,數(shù)據(jù)是否存在,采集指紋超時(shí)等。
3 程序設(shè)計(jì)
系統(tǒng)從睡眠狀態(tài)啟動(dòng)時(shí),首先進(jìn)行系統(tǒng)初始化,然后進(jìn)入正常工作狀態(tài),如圖6所示。
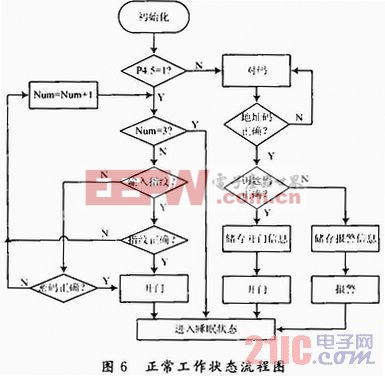
轉(zhuǎn)動(dòng)機(jī)械鎖上的金屬轉(zhuǎn)接口會(huì)改變單片機(jī)ATmega162的P4.5的狀態(tài)。開啟金屬轉(zhuǎn)接口,單片機(jī)ATmega162處理來自機(jī)械鎖發(fā)送的信息;關(guān)閉金屬轉(zhuǎn)接口,單片機(jī)ATmega162處理來自電子鎖上指紋識(shí)別模塊或鍵盤的信息。
系統(tǒng)還開啟了兩個(gè)中斷:設(shè)置中斷和匹配中斷。匹配中斷就是電子鎖和指定的機(jī)械鎖進(jìn)行匹配,只接收來自指定的機(jī)械鎖發(fā)出的信息;設(shè)置中斷就是指紋和密碼的管理。
3.1 匹配中斷
匹配中斷是鏈接多特征電子機(jī)械鎖兩個(gè)部分的前提,初次安裝電子機(jī)械鎖必須進(jìn)行匹配中斷。在開啟該中斷前,必須沒置好正確鑰匙。匹配中斷為外部中斷,通過按下控制系統(tǒng)模塊上的匹配鍵,進(jìn)入匹配中斷如圖7所示。

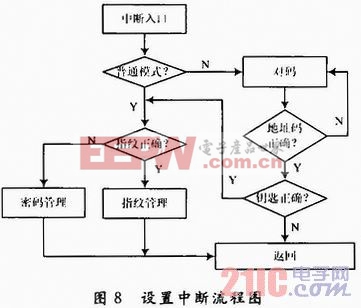
3.2 設(shè)置中斷
設(shè)置中斷分為兩種模式:普通模式和特殊模式。特殊模式就是利用正確鑰匙管理指紋和密碼,如圖8所示。










評(píng)論