基于單片機的倒車雷達的設計

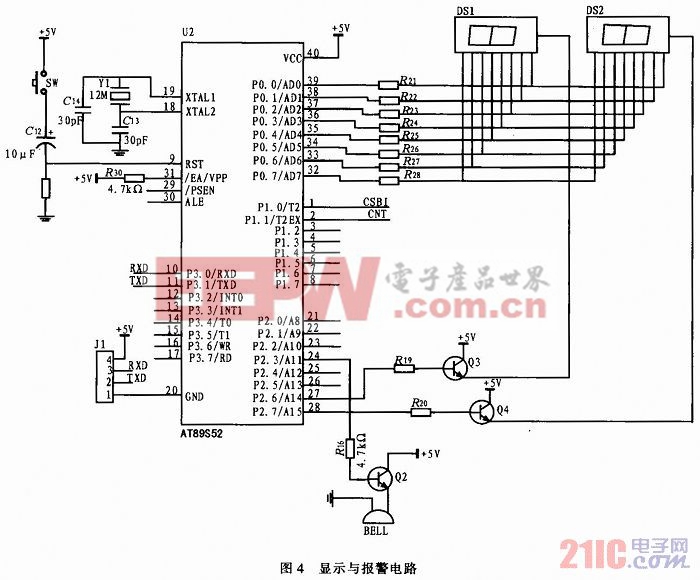
2.3 顯示與報警電路
系統報警電路由一個三極管、一個蜂鳴器和一個電阻組成,其中R16的阻值為4.7 kΩ。當倒車雷達探測到的距離小于一定值時,觸發蜂鳴器報警。控制蜂蜜器的晶體管接單片機的P2.3引腳,其引腳電平為高時報警。其電路圖如圖4所示。本文引用地址:http://www.104case.com/article/171357.htm
3 系統軟件設計
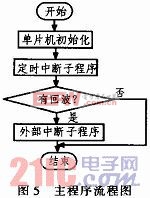
在系統硬件構架了超聲波測距的基本功能之后,系統軟件所實現的功能主要是針對系統功能的實現及數據的處理和應用。程序首先對系統環境初始化,設置定時器T0工作模式為16位的定時計數器模式,置位總中斷允許位EA并給顯示端P0和P2清0。然后調用超聲波發生子程序送出一個超聲波脈沖,為避免超聲波從發射器直接傳送到接收器引起的直接波觸發,需延遲0.1 ms(這也就是測距器會有一個最小可測距離的原因)后,才打開外中斷0接收返回的超聲波信號。由于采用12 MHz的晶振,機器周期為1μs,當主程序檢測到接收成功的標志位后,將計數器T0中的數(即超聲波來回所用的時間)按下面公式計算即可測得被測物體與測距儀之間的距離,設計時取20℃時的聲速為344.m/s則有:d=9
(CxTo)÷2=72xT0÷10000cm(其中T0為計數器T0的計數值)。測出距離后結果將以十進制BCD碼的方式顯示,然后再發射超聲波脈沖重復測量。
4 抗干擾設計
由于倒車雷達的工作環境比較容易受外界的振動、沖擊、電磁等干擾,必須在硬件和軟件設計中考慮抗干擾的能力。本設計在電源的輸入端串聯了一個LC濾波器和扼流圈,防止干擾信號的串入;在硬件電路設計時增加了信號隔離、接地屏蔽;軟件設計時對脈沖信號進行了濾波。
5 結論
文中設計的是基于AT89S52單片機的超聲波倒車雷達,其結構簡單、體積小、抗干擾性能好,可應用于汽車倒車等場合,提醒駕駛員倒車時有效地避開可能對倒車造成危害的障礙物和行人,從而有效避免由于倒車造成的汽車碰撞或擦傷經濟損失和人身安全問題,具有較強的實用性。當然,要滿足更高的精度要求,還須進行適當改進,例如可增加溫度補償單元;在某些特殊場合的應用中,還要考慮超聲波的入射角、反射角以及超聲波傳播介質的密度、表面光滑度等因素。












評論