基于AVR和51單片機的機器魚語音控制系統設計與實現

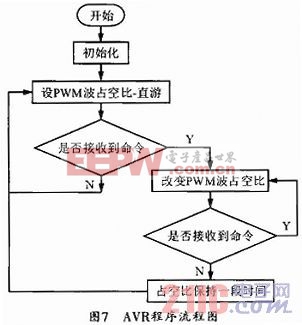
AVR是魚體主控芯片,它的軟件主要包括主程序,串口初始化(波特率和串口模式需要同上一致,還設置接收中斷打開狀態),產生使機器魚直游的PWM波,無論在什么狀態,只要串口接收到命令就會產生中斷,就需要根據命令改變PWM波的占空比,從而改變機器魚的游動方向,需要注意的是在改變PWM波占空比以后,只需要保持此占空比一段時間(該時間段內有可能有新的命令),在魚體改變方向以后就需要再次將占空比改為直游。AVR控制流程如圖7所示。本文引用地址:http://www.104case.com/article/170958.htm
4 實驗結果
此語音控制系統在實驗中已經得到實現。我們在51單片機中編輯了“zuo”、 “you”、 “qian”等命令:在AVR單片機的接受中斷編輯了相應命令的PWM波占空比;所有串口通訊參數設置為:波特率9600bps;串口模式為8個數據位,1個停止位,無校驗位;頻道設置為28;發射功率設為最大(FF)。使用了奧林巴斯ME52的麥克風作為語音接收設備。

表1是魚在直游(前)的時候,三個舵機在十個離散周期各自的轉角。在轉向的時候,前兩個舵機偏轉,第三個舵機保持不變;在進行“左”轉命令時,舵機1和舵機2在直游基礎上加上負40°;“右”轉時加上正40°。由于舵機轉角與PWM波占空比是線性關系,在此基礎上,我們匹配了PWM波占空比與舵機轉角的數學關系式
![]()
jiaodu是定義的直游時各舵機的轉角數組,j是舵機號,i是周期,pianjiao是左轉右轉等附加給直游時的角度(正負40°);xiuzheng是實際中需要調試的補償角度。
實際操作中,當發出“左”、 “右”、 “前”等命令時,機器魚會立即做出相應的動作。
5 結束語
文中主要介紹了語音識別技術在機器魚上的應用以及魚體波的產生原理,實現了語音控制機器魚的游動方向,相信隨著機器魚的研究深入,可以在語音系統基礎上實現更多功能,使機器魚更加趨于智能化,最終可以為人類探索海洋提供更多幫助和便利。













評論