基于ATmega16單片機的CAN總線轉RS232設計

3.2 MAx232電路設計
選擇MAX232芯片作為RS232與CAN總線的電平轉換器。MAX232是一種電平轉換驅動器,提供TTL與RS232電平的轉換。其13、14腳接到232接口的2、3針;11、12腳接到單片機的接收、發送端。
選用Phi l ip公司的SJAl000芯片實現CAN控制器和CAN總線驅動器。SJAl000控制器與單片機硬件連接電路設計,如圖2、3所示。
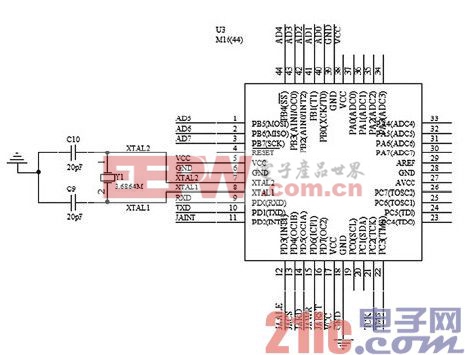
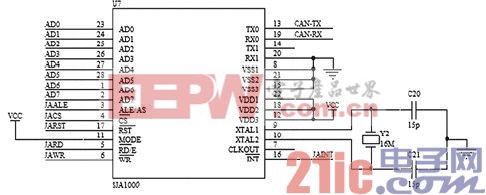
為使SJAl000正確復位,CAN控制器必須連接一個穩定的振蕩器時鐘,這里選擇16MHz的晶振。
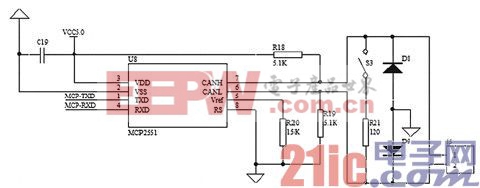
3.4收發器電路設計
收發器是協議控制器和物理傳輸線路之間的接口,這里由MCP2551實現。協議控制器通過串行數據輸出線(Tx)和串行數據輸入線(RX)連接到收發器,收發器通過有差動發送和接收功能的兩個總線終端CANH和CANI。連接到總線電纜,實現CAN總線的數據通信。如圖4所示。












評論