基于ATmega16單片機的CAN總線轉RS232設計

CAN(Controller Area Network)總線是德國BOSCH公司為解決現代汽車中眾多控制與測試之間的數據交換開發的一種串行數據通信協議,是一種多主方式的串行通信總線。CAN總線是一種開放式、數字化、多點通信的控制系統局域網,具有通信速率高、傳輸時間短、傳輸距離遠、糾錯能力強、控制簡單、擴展能力強以及性價比高等特點,是目前國際上應用最廣泛的現場總線之一。但是目前PC機普遍配置RS232串行通信接口,沒有CAN總線接口。實際中很多設備帶有RS-232接口沒有CAN總線接口,為了方便具有RS-232接口的設備與CAN總線的數據通信,本文完成了基于單片機ATMega16控制的CAN總線與RS-232轉換器電路設計和軟件設計,實現了CAN總線數據與RS-232接口設備的數據傳輸。
本文引用地址:http://www.104case.com/article/170589.htm一、簡述CAN總線與RS232協議
CAN作為一種多主方式的串行通訊總線,其基本設計規范要求高位速率和較高的抗電磁干擾性能,而且要能夠檢測出通訊總線上產生的任何錯誤。當信號傳輸距離達10km時,CAN仍可提供高達5kbit/s的數據傳輸速率。表1為CAN總線上任意兩個節點之間最大傳輸距離
與其位速率之間的對應關系。
由此可見,無論從實時性、適應性、靈活性,還是可靠性上來看,CAN總線都是一種比較優秀的串行總線。當兩臺串口設備的相距較遠,不能直接用RS-232把它們連接起來時,就可以把RS-232轉換為CAN,通過CAN總線來實現串口設備的網絡互連。
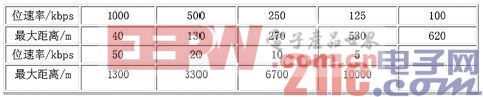
表1 CAN總線系統任意兩節鼎足之勢之間的最大距離
RS-232和CAN在電平和幀格式上都是很大的不同。具體表現如下:RS-232標準電平±(3V~15V)之間。而CAN信號則使用差分電壓傳送,兩條信號線稱為“CAN_H”和“CAM_L”,靜態時均為2.5V左右;RS-232串口的幀格式為:一位起始位,八位數據位,一位可編程的第九位,一位停止位。而CAN的數據幀格式為:幀信息+ID+數據。
二、CAN總線轉RS232總體設計
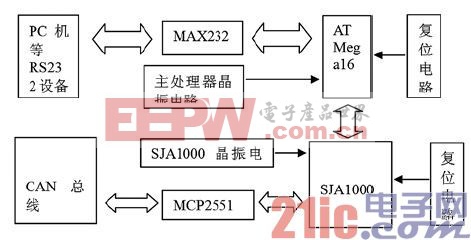
CAN總線轉2 3 2 的接口硬件電路, 主要選用MAX232、ATMega16、SJAl000和MCP2551設計實現。
其原理框圖如圖1所示。
三、轉換器硬件設計
3.1 主控制器設計
主控制器選擇ATMEL公司的ATMega16作為主處理器,該芯片是一個低電壓,高性能單片機,片內含可反復擦寫的EEPROM和隨機存取數據存儲器(RAM),兼容標準MCS-51指令系統。
ATMega16有44個引腳,32個外部雙向I/0端口,同時內含3個外中斷口,2個8位和1個16位可編程定時計數器,1個全雙工串行通信口,ATMega16可按常規方法進行編程,也可在線編程。ATMega16的4腳接復位電路,低電平有效;9,10腳接MAX232的數據接收/發送端;PD口腳接SJAl000的控制端端;7,8腳接晶振電路;PB口接SJAl000的復用地址/數據總線。












評論