基于單片機C8051F020 的數字多電機控制平臺的設計

介紹了基于單片機C8051F020 搭建的多臺電機控制平臺,硬件電路簡單可靠,功率電路采用場效應管自行搭建,通用性較強,通過改寫軟件,可直接用于其它小功率電機的驅動控制系統。
本文引用地址:http://www.104case.com/article/170516.htm0 引言
步進電動機因具有轉子慣量低、定位精度高、無累積誤差等特點,非常適合用于開環位置控制系統中。直流電機是伺服控制中常用的電機。然而在實際系統中為滿足不同的功能往往同時存在多個運動部件,常用的方法是一個獨立的功能對應一個控制系統,這樣雖然模塊性很好,但是占用了大量的系統資源和空間,也在一定程度上降低了系統的可靠性。
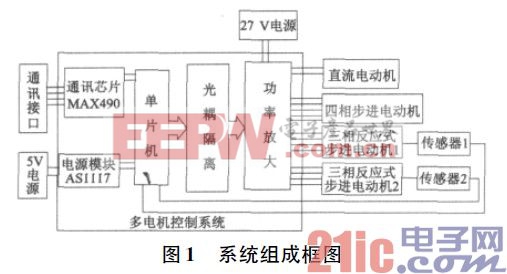
如在某系統中存在4 個運動部件,分別為兩臺三相反應式步進電動機,一臺直流電機和一臺四相步進電動機的控制。本著提高系統集成度的想法,本文只用一個控制芯片C8051F020 就完成了以上4 臺電機的驅動控制,電路簡單,可靠性高。
1 總體設計
基于Cygnal 公司的MCU 控制芯片C8051F020的多電機控制系統平臺,能根據控制指令完成對四臺電機的控制。組成框圖如圖1 所示。
2 硬件設計
2. 1 主控芯片選擇
美國Cygnal 公司生產的C8051F020 單片機使用CIP - 51 微控制器內核。與標準的8051 結構相比,它具有如下特點:
( 1) 指令執行速度有較大的提高,峰值速度達到25 MIPS;
( 2) 除了4 個標準的8051 的端口外,還具有4 個附加端口,共64 個通用I /O 端口;
( 3) 所有I /O 端口均可配置為漏極開路或推挽輸出,進一步向低功耗應用發展;
( 4) 引入數字交叉開關,允許用戶自行組合通用I /O 端口和所需的數字資源;
( 5) 具有兩個串行UART 接口,5 個16 位通用定時器,5個比較捕捉模塊;
( 6) 具有片內看門狗、片內溫度傳感器和片內VDD 監視器,使用時幾乎無需外擴;
( 7) 可通過JTAG 接口實現軟件在線調試功能。
C8051F020 單片機以其在執行速度、系統資源等方面的明顯優勢,成為本多電機控制系統非常理想的選擇。
2. 2 通訊電路設計
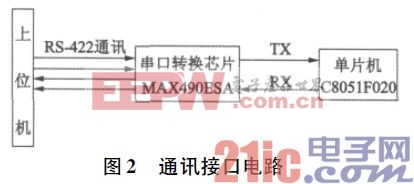
根據與上位機的通訊協議,通訊接口采用標準雙向差分RS - 422 串口通訊,工作電壓為5 V,波特率為38 400 bit /s.C8051F020 系列MCU 內部有兩個增強型全雙工UART,通訊協議為RS - 232,工作電壓也為5 V.因此選用了MAX490 器件,MAX490芯片可以很方便地將上位機的RS422 差分信號轉為單片機的串口信號。具體電路如圖2 所示。
2. 3 步進電動機驅動電路
設計步進電動機的控制可采用串行控制,采用環形分配器來完成換相。也可以采用并行控制,由單片機完成步進電動機的換相,在系統資源夠用的情況下,采用并行控制可以簡化設計電路。本系統采用了并行控制,由軟件控制單片機的I /O 端口輸出按一定時序的PWM 波,來控制電機繞組通斷電。
電機屬于感性負載,電機繞組中的電流不能突變,電機由A 相換到B 相之后,若沒有保護電路,A相繞組中的電流將保持相當長的時間,這樣電機運行很不平穩。為了使電機運行平穩,在系統加入了保護措施,使繞組線圈中的電流迅速瀉放,以利保護電機。圖3 為電機一相的控制電路。
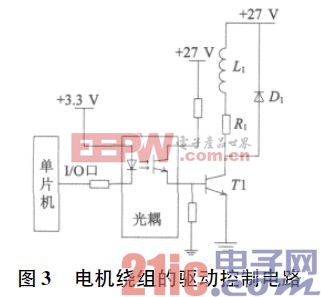
為了消除步進電動機的串擾,所有單片機輸出信號均經光耦隔離。單片機輸出信號為3. 3 V TTL電平,這對電機來說驅動力不夠,因此采用場效應管經功率放大電路后,用來驅動電機。本系統步進電動機的驅動采用了單電壓驅動方式,這種驅動電路的優點是線路簡單,成本低,低頻時響應較好; 缺點是存在共振,高頻帶載能力下降。系統要求的電機運轉速度較低,不考慮高頻帶載能力,為解決共振問題,采用PWM 波對電機供電,通過改變電機的共振點來達到減小振動的目的。











評論