基于LabVIEW的電機轉速監測系統的設計

摘要 在電機控制系統中,轉速測量的精確度、實時性和穩定性直接影響電機調速系統的性能。文中設計了一種基于LabVIEW軟件平臺的電機轉速監測系統,選擇絕對式光電編碼器和單片機作為前端轉速信號的采集系統,通過RS-232串口通信將數據傳送至上位機;利用LabVIEW的數據處理和顯示動能,對轉速信號進行實時地處理、顯示和保存。該設計在開關磁阻電機調速系統中進行了實驗測試,結果證明,該方法人機界面良好、測速范圍寬、精度高、響應速度快、抗干擾能力強。
關鍵詞 LabVIEW;絕對式光電編碼器;單片機
LabVIEW是美國國家儀器司(National Instrument)開發的一種虛擬儀器平臺,是一種用圖標代碼來代替文本式編程語言的開發工具。其通過在表示不同功能節點的圖標之間連線來完成上位機的程序,在這一點上,其完全不同于以往基于文本的傳統開發語言。LabVIEW功能強大、操作靈活,使用圖形化的編程語言,大幅節省了程序的開發周期,且其運行速度不受影響,體現出較高的效率,被廣泛應用于自動測量系統、工業過程自動化、實驗室仿真等領域。
以往利用LabVIEW設計數據采集監測系統時,通常采用數據采集卡進行前端信號的采集,但是其價格昂貴。文中設計了一種基于LabVIEW和STC12系列單片機的電機轉速監測系統,不僅節約了設計成本,且系統操作簡便,穩定可靠,滿足電機的測速要求。
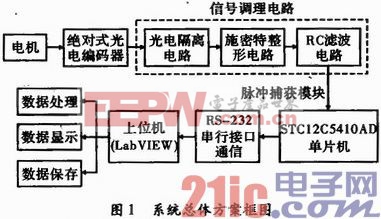
1 系統的總體方案設計
系統由上位機和下位機組成。下位機采用STC12C5410AD單片機作為主控芯片,絕對式光電編碼器的脈沖輸出信號通過信號調理電路后送至單片機,單片機通過自帶的脈沖捕獲模塊,接受連續的編碼器脈沖信號并計算電機轉速;上下位機采用RS-232串行接口進行通信,將轉速計算值傳送到上位機LabVIEW,通過LabVIEW對轉速值進行實時處理、顯示和保存。基于LabVIEW的電機轉速監測系統總體方案如圖1所示。
2 電機的測速原理
2.1 絕對式光電編碼器簡介
系統采用A-JXW-12A-11-G8-30C絕對式光電編碼器,該編碼器為11位絕對式軸角編碼器,具有零點固定、單值函數、抗干擾能力強等特點。結構上采用防塵、防潮措施、耐沖擊、耐振動、體積小、重量輕。能夠測量角位移,旋轉速度等,并能將所測結果以自然二進制碼形式輸出。供電電壓12 V,集電極開路輸出,圖2為A-JXW-12A-11-G8-30C絕對式光電編碼器實物圖。

2.2 轉速計算方法
設計采用T法測速,即利用計數器對已知頻率為的高頻時鐘脈沖進行計數,測出電機相鄰兩個轉子位置脈沖信號的時間間隔來計算電機的轉速。在T法測速中,測速時間T是通過記錄高頻時鐘脈沖個數m得出,即
T=m/f (1)
電機轉動一周轉子位置信號含有的脈沖個數為PN,設計采用編碼器的最低位進行計算,因此PN為1 024,則轉速計算公式為
![]()
高頻時鐘脈沖為單片機的晶振頻率2分頻所得,即22.1184/2 MHz,當電機轉速為500r/min時,理論上高頻時鐘脈沖計數值m為1296,若記錄值m為1 295或1 297,T法計算的電機轉速分別為500.4 r/min或499.6 r/min,計算誤差為-0.08%≤△e≤0.08%;當電機轉速為1 500 r/min,理論上高頻時鐘脈沖計數值m為432,若記錄值m為431或433,T法計算的電機轉速分別為1503.5r/min或1496.5r/min,計算誤差為-0.23%≤△e≤0.23%。本方法完全滿足所試驗的開關磁阻電機調速系統的誤差范圍,且測量方法簡單可靠,實用性強。











評論