基于人工神經網絡的過閘流量軟測量研究

由于系統是非線性的,初始值對于學習是否達到局部最小、是否能夠收斂以及訓練時間的長短的關系很大。一般選取初始權值為(-1,1)之間的隨機數。在MATLAB工具箱中可采用函數initnw.m初始化隱含層權值。學習速率決定每一次循環訓練中所產生的權值變化量。若學習速率過大可能導致系統的不穩定;但學習速率過小會導致訓練時間較長,收斂速度很慢,不過能保證網絡的誤差值不跳出誤差表面的低谷而最終趨于最小誤差值。所以在一般情況下,傾向于選取較小的學習速率以保證系統的穩定性。學習速率的選取范圍在0.01到0.8之間。綜合考慮一下,本系統選取學習速率為0.1。BP網絡訓練程序如下所示[9]:
本文引用地址:http://www.104case.com/article/170163.htm%定義輸入向量和目標向量
P=[0.5 0.6 0.8 ……;0.7082 0.7081 0.7079 ……];
T=[0.3744 0.4533 0.3735 0.648 ……];
%創建BP網絡和定義訓練函數及參數
net=newcf( minmax(P),[15,1],{‘logsig’,‘purelin’},‘traingd’);
net=initnw(net,1);
net.trainParam.epochs=5000;
net.trainParam.lr=0.1;
net.trainParam.goal=0.00001;
%訓練神經網絡
[net,tr]=train(net,P,T);
待網絡訓練好后,利用選定的20組測試樣本對其進行測試,以測量其泛化能力。測試結果如圖2和圖3所示。
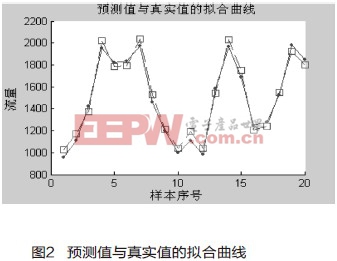
圖2為真實流量值與通過BP網絡軟測量模型的預測值之間的擬合曲線,方框代表預測值,圓點代表真實值。
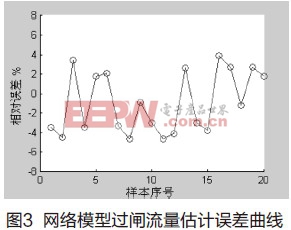
圖3為BP網絡模型過閘流量估計誤差曲線,從圖中可以看出網絡估計誤差在5%以內,與流量真值符合良好,反映了軟測量模型良好的測量能力。通過改變網絡結構、神經元的激活函數、學習算法,進一步增強神經網絡對模糊數據的識別能力和容錯性,從而可進一步提高模型精度。
結論
本文提出了一個基于兩層BP網絡的過閘流量軟測量模型,訓練與測試結果表明:該網絡對過閘流量有很好的預測性,誤差在5%以內。而一般傳統的流速儀測流的誤差也為5%,因此該模型能滿足工程測量的需要。另外,預測值與流量真值具有較好的一致性,也充分顯示了人工神經網絡解決工程問題的適用性。因此,可以通過基于人工神經網絡的軟測量模型來解決過閘流量與各影響因素之間的復雜非線性關系,為過閘流量的測量提供了一種可供選擇的有效手段。
參考文獻:
[1] 穆祥鵬,陳文學,崔巍等.弧形閘門流量計算方法的比較與分析[J].南水北調與水利科技,2009,7(5):20-22
[2] 王知生,楊艷玲,王廣森.海日蘇攔河閘過閘流量的測驗方法[J].內蒙古科技與經濟,2002,7:72
[3] 王孝紅,劉文光,于宏亮.工業過程軟測量研究[J].濟南大學學報(自然科學版),2009,23(1):80-85.
[4] 姜萬錄,雷亞飛,張齊生等.基于神經網絡軟測量的動態流量測量方法研究[J].流體傳動與控制,2007,6:25-30
[5] 叢爽.面向MATLAB工具箱的神經網絡理論與應用[M].第3版.合肥:中國科學技術大學出版社,2009:65-80
[6] 侯媛彬,杜京義,汪梅.神經網絡[M].西安:西安電子科技大學出版社,2007:35-39
[7] 孫增圻.智能控制理論與技術[M].北京:清華大學出版社,1997:129-134
[8] 王崢,王帆.基于神經網絡調速系統故障診斷的數學模[J].三峽大學學報(自然科學版),2004,26(2):123-126
[9] 周開利 抗藥紅.神經網絡模型及其MATLAB仿真程序設計[M].北京:清華大學出版社,2005:89-100






評論