嵌入式ARM下的觸摸屏驅動系統設計

摘要:介紹了基于飛思卡爾芯片i.MX27和嵌入式linux系統下的觸摸屏硬件的連接設計和軟件的驅動設計,并依照此設計實現了觸摸屏的從硬件到軟件的驅動系統。該實現主要應用于家庭無線智能控制系統中。
本文引用地址:http://www.104case.com/article/168127.htm文章首先介紹了觸摸屏的實現原理,然后介紹了觸摸屏芯片AD7873的特性,在此基礎上設計了ad7873與i.MX27和觸摸屏的連接PCB圖,最后依照硬件連接圖設計了嵌入式Linux下的驅動,并成功通過了tclib觸摸屏專業測試軟件的測試,在家庭智能網關系統的測試中也成功運行,實現了從硬件到軟件的嵌入式下觸摸屏的驅動系統設計。
1引言
隨著計算機技術的發展和普及,觸摸屏技術得到了越來越廣泛應用,在各種手持設備中,如手機、MP4、掌上游戲機、掌上PDA等,由于其方便、舒適,使其完全擺脫了鍵盤和鼠標的束縛,使人機交互更為直截了當。而在微軟最新開發的windows7操作系統中,就有其值得驕傲并加以推廣的多點觸摸技術,并成為一大賣點。可見,觸摸屏技術引起了上到微軟,下到普通老百姓的關注。而在我們的日常生活中,無論你是在商場購物,還是在銀行存取款,觸摸式的自動服務器將能為你提供了方便快捷的服務。這里通過對觸摸屏原理的理解和分析,成功的設計出了CPU與觸摸屏芯片之間的硬件連接,并依照硬件和驅動設計的原理,設計出了基于嵌入式Linux和飛思卡爾i.MX27芯片以及AD7873觸摸屏芯片的驅動程序,并成功移植到內核中,實現了家庭控制器系統的觸摸技術。
2硬件系統的構成
2.1電阻式觸摸屏原理。
電阻式觸摸屏是一種傳感器,它將矩形區域中觸摸點(X,Y)的物理位置轉換為代表X坐標和Y坐標的電壓。當觸摸屏表面受到的壓力(如通過筆尖或手指進行按壓)足夠大時,頂層與底層之間會產生接觸。所有的電阻式觸摸屏都采用分壓器原理來產生代表X坐標和Y坐標的電壓。如圖1所示,分壓器是通過將兩個電阻進行串聯來實現的。上面的電阻(R1)連接正參考電壓(VREF),下面的電阻(R2)接地。兩個電阻連接點處的電壓測量值與下面那個電阻的阻值成正比。為了在電阻式觸摸屏上的特定方向測量一個坐標,需要對一個阻性層進行偏置:將它的一邊接VREF,另一邊接地。
同時,將未偏置的那一層連接到一個ADC的高阻抗輸入端。當觸摸屏上的壓力足夠大,使兩層之間發生接觸時,電阻性表面被分隔為兩個電阻。它們的阻值與觸摸點到偏置邊緣的距離成正比。觸摸點與接地邊緣之間的電阻相當于分壓器中下面的那個電阻。因此,在未偏置層上測得的電壓與觸摸點到接地邊之間的距離成正比。
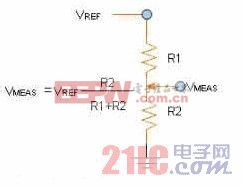
圖1原理示意圖
2.2AD7873介紹及與系統硬件原理
AD7873是一款12位逐次逼近型ADC,具有同步串行接口以及用于驅動觸摸屏的低導通電阻開關,采用2.2V至5.25V單電源供電,吞吐量大于125KBPS.
AD7873可用于電池測量、溫度測量和觸摸壓力測量,還具有一個2.5V片上基準電壓源,可用于輔助輸入、電池監控器和溫度測量等模式。不使用時,可關斷內部基準電壓源以降低功耗。也可以使用外部基準電壓,并可在1V至VCC范圍內變化,模擬輸入范圍為0V至VREF.這款器件具有關斷模式,此模式下功耗不足1μA。
2.3AD7873與CPU和觸摸屏的硬件連接圖
其硬件原理框圖如下,其中的X+,Y+,X-,Y-與觸摸屏的相應引腳相連,接受來自觸摸屏的模擬信號,然后經過AD7873芯片的內部處理成數字信號,通過SPI總線將數據傳送給CPU,請求處理。CS為片選引腳,與CPU的DTR_DCE1相連,PENIRQ為中斷引腳,接CPU的GPIO1_0.
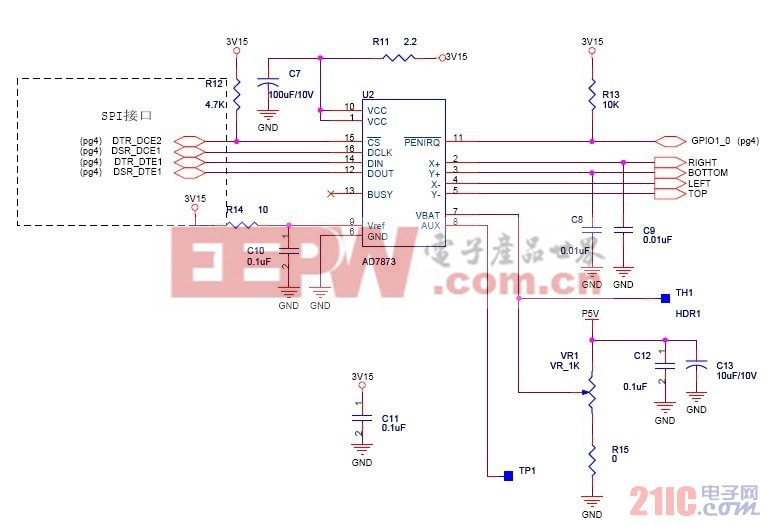
圖2硬件連線圖
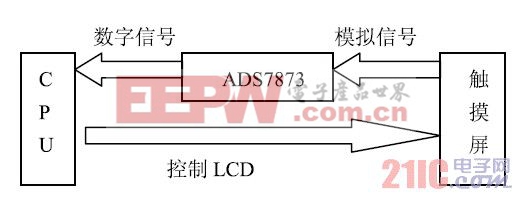
圖3觸摸系統框圖
3軟件系統
3.1Linux設備驅動介紹
在Linux系統中,為了簡化對設備的管理,所有的外圍設備被歸結為3類:字符設備、塊設備、網絡設備。Linux對所有的物理設備進行了抽象,并定義了一個統一的概念:接口。AD7873被定義為一個字符設備,采用spi接口與CPU通訊。
3.2驅動部分重要函數的設計
(1)設備驅動程序中數據結構strcutdriver定義了一系列函數操作的接口,這個數據結構將整個驅動連為一體,由這個結構可以看出整個驅動的脈絡。由于AD7873與CPU連接方式為SPI總線連接,因此將此設備注冊為SPI設備,即要用到數據結構structspi_driver.
對應于AD7873設備,設計編寫的數據結構如下:
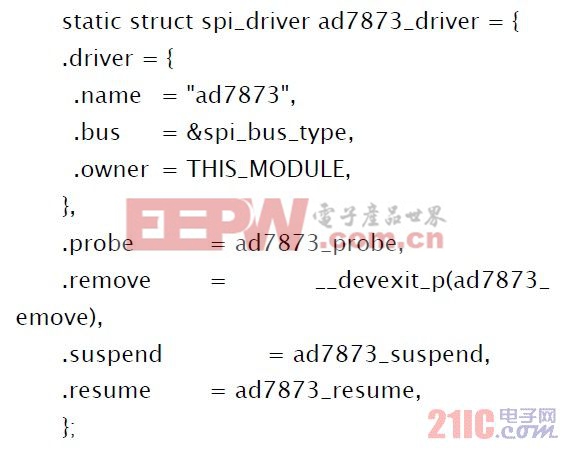
其中,driver中定義了驅動名稱、總線類型和驅動所有者。
probe函數為探測設備的函數。其主要進行初始化設備數據結構、初始化中斷、向設備發送控制字等。
remove函數為設備移除函數。其主要進行移除設備文件、釋放中斷、釋放設備。
suspend為設備暫停函數。
resume為設備恢復函數。
(2設備初始化函數staticint__initad7873_nit(void)即是注冊上述數據結構,也即是注冊一個驅動,其中主要的內容為:
returnspi_register_driver(ad7873_driver);(3)還要設計一個重要的函數,就是中斷函數,在觸摸屏被按下的時候產生中斷,在中斷函數中的重要工作就是啟動定時器,以判斷觸摸后的動作是觸摸筆被提起還是繼續按下。其函數原型設計為staticirqreturn_tads7873_irq(intirq,void*handle);(4)定時器函數設計的目的就是判斷觸摸屏是否被提起,被提起就立刻刷新設備的數據到應用層,仍然處于按下狀態,則需要繼續測量。其函數原型設計為:
staticvoidads7873_timer(unsignedlonghandle);
3.3驅動的編譯和加載
驅動程序加入內核有兩種方式動態和靜態,動態就是只是把驅動編譯為模塊,系統啟動后執行insmod后加載,靜態是指直接編譯進內核,系統啟動后自動加載了。由于我們的驅動需要經過測試才能加入內核,因此采用動態的方式加載驅動。
linux操作系統文章專題:linux操作系統詳解(linux不再難懂)







評論