基于Video4Linux的攝像頭驅動設計

V4L支持兩種方式捕獲圖像:mmap(卻嬗成浞絞?和read(直接讀取方式),本系統采用mmap。需預先設置好圖像的大小和深度,接著使用 VIDIOCGMBUF命令,它會返回用于mmap的緩存(buffer)的大小以及每幀緩存的偏移地址(offset)。驅動程序里的映射函數為 static intbf536_v411_mmap(Struct file*filp,structvm_area_struct*vma);抓幀完成后,在應用程序里通過內存映射,讀取圖像數據。本文引用地址:http://www.104case.com/article/166878.htm
2 硬件平臺
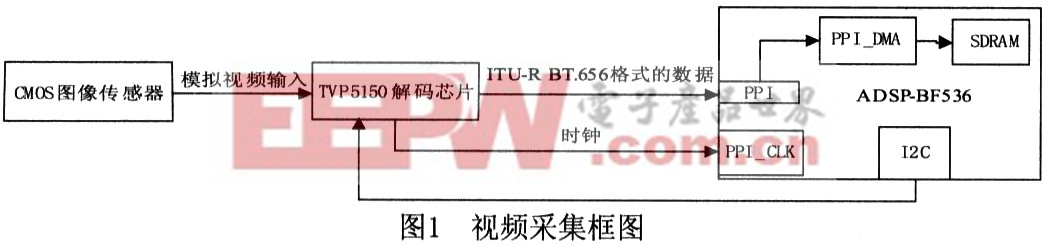
本系統采用CMOS模擬傳感器,經TI公司的TVP5150A視頻解碼芯片把模擬信號轉成 ITU-R BT.656視頻信號,再送給ADI公司的Blackfin536 DSP處理器進行圖像處理,如圖1所示。TVP5150向DSP提供采樣時鐘信號CLK(27MHz),8根數據線傳輸內嵌同步控制碼流的ITU-R BT.656格式的數據,DSP通過I2C接口對視頻解碼器進行配置。視頻數據由DMA搬運到SDRAM。
3 驅動程序設計
3.1 驅動程序核心結構體的介紹
本系統的軟件平臺是嵌入式uclinux,因此,攝像頭作為一個設備驅動加載到uclinux內核中。一般而言,每個設備驅動都會有它的核心結構體,攝像頭驅動的核心結構體設計如下:struct camera device
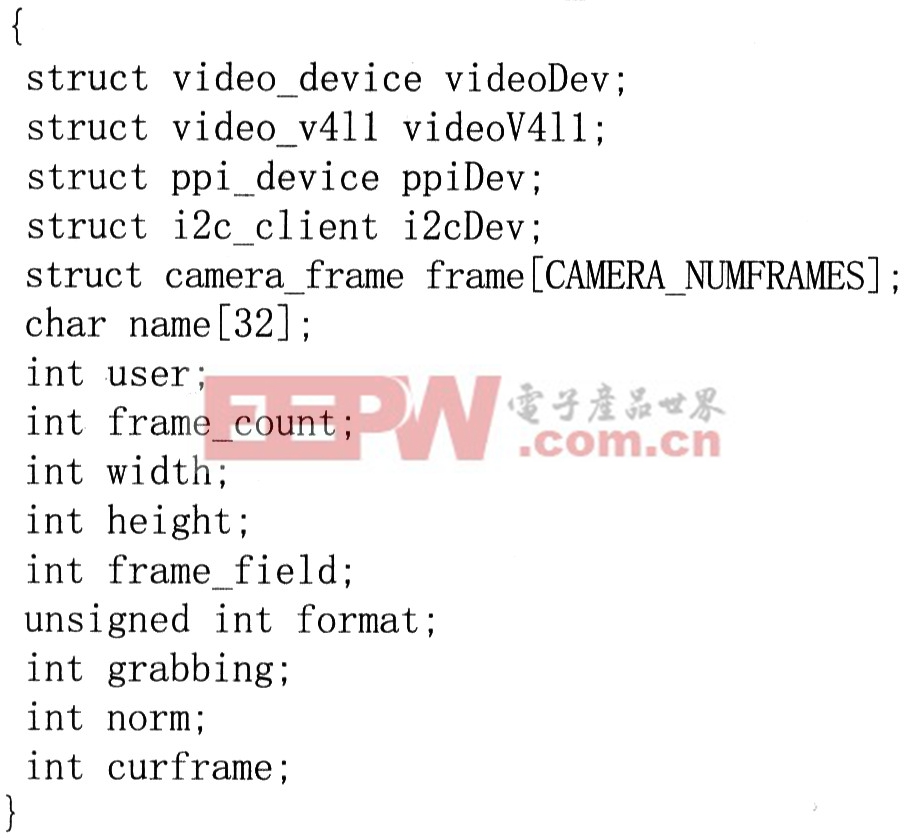
該結構體儲存了幾乎全部與攝像頭視頻圖像相關的信息。其中的結構體videoDev和videoV4l1是與V4L相關聯的,ppiDev是與ADSP- BF537處理器硬件配置相關的,而frame[CAMERA_NUMFRAMES]則與采集時當前視頻幀數據相關聯。此外,camera_device 該核心結構體還定義了表示奇偶場的成員變量frame_field,表示當前幀的抓取狀態的成員變量grabbing等。
3.2 硬件配置
本系統在開發過程中,最主要的難點在于硬件的配置,正確配置TVP5150、PPI、DMA需要搞清楚整個攝像頭的工作原理,以及各種圖像格式的基本知識。本文主要給出PPI和DMA的幾個關鍵配置選項。
3.2.1 PPI配置
TVP5150A視頻解碼芯片把模擬信號轉換成ITu-RBT.656視頻信號,ITU-R BT.656是4:2:2并行接口的數字演播室標準。對于PAL制系統(NTSC系統類似),一幀圖像包括兩場視頻數據(奇偶場),每一場圖像由四部分構成:有效視頻數據,水平消隱,垂直消隱以及控制字。而PPI接口在ITU-656輸入模式下可以支持3種數據傳輸,若選擇有效視頻數據,則可以實現PPI 與TVP5150A解碼器的無縫連接。且傳輸的有效視頻數據就是UYVY422格式,所以配置PPI控制寄存器為ITu-656輸入、傳輸有效視頻數據。 PPI傳輸的有效視頻數據每場都由288行組成,每行有1440個取樣字,其中720個亮度Y取樣字,360個藍色色差Cb,360個紅色色差Cr,按 Cb、Y、Cr、Y的次序排列。而UYVY422格式數據是:每個像素點都取亮度值,而藍色色差和紅色色差是每兩個像素點才各取一個,兩者交替取,所以圖像像素是720×576。這樣可以確定ppi frame=576(整幅圖像的行數)。而ppi count不用配置,因為在ITU-R BT.656視頻信號中有H和V信號。










評論