教你用電子元器件DIY一個可以爬墻的簡單機器人

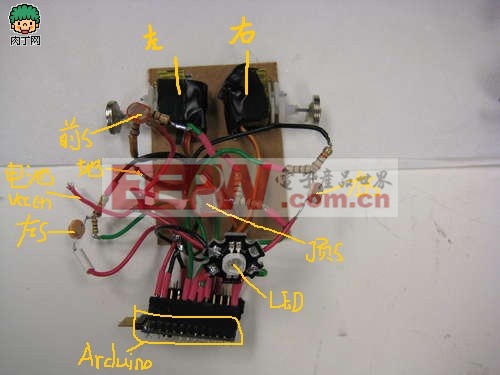
● 我程序里是這樣設置的:Analog 0 > 頂部的傳感器;Analog 1 > 左邊的傳感器;Analog 2 > 前面的傳感器;Analog 3 > 右邊的傳感器。
9 加上RGB LED燈

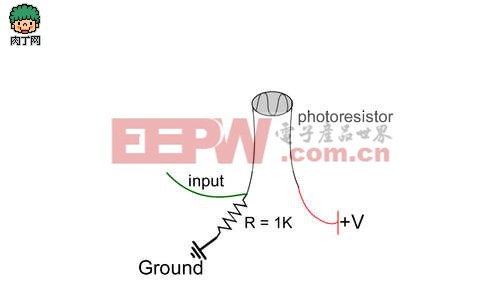
● 把每個光敏電阻(光傳感器)都連到Arduino上,一共4個傳感器,左、右、前、后。
● 你是不是想在每個端口和LED燈之間放個電阻(200 歐姆左右)?我沒有醬紫,因為我的LED燈可以承受的電壓比Arduino能提供的高得多,所以不會被燒。
10 安裝電池
● 其實捏,能提供3—4V的電池都可以用,越輕越好。我使用了sparkfun鋰電池。接地,然后高壓直接接Arduino的VCC口。
11 上程序!!
● 這代碼是關于2個伺服電機根據4個光傳感器的輸入值而進行驅動。根據模式,有幾種運動方式。 點此獲得代碼
紅色最快,趨向物體(當光傳感器檢測到光被擋住時);
藍色是中速,背向物體(背向黑色區域);
黃色最慢,檢測到物體就停止。
● 小W和它的兄弟姐妹們通過磁鐵輪子在墻上運動,可以左轉右轉和前行;根據不同模式可進行調速。
● 當頂部的傳感器被遮住超過3秒,所有傳感器自動校準。
12 別讓小W裸奔
● 給小W穿件衣裳。但之前必須確定程序能跑,然后你能分得清哪個伺服機是左,哪個是右。

● 因為小W要垂直運動,衣裳越輕越好啊!我用的硬紙殼,其實報紙或者輕塑料都能使。

● 我把伺服機用熱膠黏在硬紙盒里,傳感器分布在前后左右,然后用硬紙殼加固。為了讓熱傳感器和齒輪舒舒服服在里面呆著,我量體裁衣剪了些洞。小W的頂部其實就是。。。就是一張紙!

DIY機械鍵盤相關社區:機械鍵盤DIY
伺服電機相關文章:伺服電機工作原理









評論