表情機器人設計與實現

摘要:表情機器人的研究在國內還處于初級階段,為了推進這一新的科學熱點的研究,本文從生物學的角度和和諧人機交互的角度出發,運用了機械設計、傳感器技術、舵機控制、嵌入式系統、人工智能等技術設計了一個情感機器人頭,它可以和人進行對話并產生表情,最終為人機交互的過程中人們能與計算機進行具有情感、自然、和諧的交互提供接口。
1 引言
十多年前“詭異谷”【1】的理論制約了類人機器人的發展,但隨著科技的發展,人們再次把關注的眼光投向了“更像人類的機器人”身上,機器人博覽會上的saya[2]已經到了以假亂真的地步,制作外形和行為方式更接近于人類的機器人已經成為了新的焦點和熱點。在國外的一些科學家已經取得了一定的成績,但在國內,對于表情機器人的研究還處于初級階段,為了能在08年的奧運會上看到我們自己制作的機器人解說員,北京科技大學的王志良老師的課題組正致力于此項研究并取得了一定的成果。
2機器人頭部的設計要求
本設計的目的是設計一個仿人的機器人頭部,以實現各種表情,來表達機器人內在的情感狀態,最終使機器人能通過豐富生動的表情與人進行自然流暢的情感交流。既然如此,所要設計的機器人頭部,就必須滿足下面的要求:
1 外觀從相當程度上符合人類的審美觀點,能給人以親切感和可信任感;
2 其整體乃至局部的尺寸,以及每個器官所能運動的幅度都要與人類的頭部相接近,也就是說,在接近人腦這個有限的空間內,要放置眼、耳、鼻、口、眉等器官以及相應的驅動部件和傳動機構;
3 整體機構的動作要協調,要符合人類頭、面部的運動規律,要求運動傳遞要準確,不能失真,這樣才能準確的控制每一個運動單元達到要求的位置,實現總體的協調;
4 因為考慮實際制造時要為機器人加上攝像頭、微型麥克甚至力覺等傳感器,所以設計時必須留出必要的空間。整個設計具有空間狹窄,運動范圍小,運動準確,負載小的特點,這也是整個設計所要著重解決的問題;
5 可以實現眼球轉動,眼瞼開合,頭部轉動。
從機器人整體結構出發,在考慮機構的運動學、動力學和控制系統、驅動系統要求的前提下進行機器人頭部機構設計。
人頭部運動包括頸部自由轉動和擺動、以及面部眼球、眼瞼、下顎的運動。
部位 | 運動機能 | 單元數 | 自由度數 |
眼球 | 上下轉動、左右轉動 | 2 | 4 |
眼瞼 | 閉合 | 2 | 2 |
眉毛 | 上下移動 | 2 | 2 |
頸部 | 左右轉動、上下擺動 | 1 | 2 |
下顎 | 閉合 | 1 | 1 |
3機器人頭部結構設計
眼睛部分共有四個自由度,包括眼球的繞Z 軸和繞Y 軸旋轉。對于人類的眼球,正常的情況下,任何表情時,兩個眼球的繞Y 軸旋轉運動都是完全同步的,因此,可以使這兩個眼球的繞Y 軸旋轉共用一個伺服電機驅動,既節省了空間,又簡化了機構【3】。
眼瞼有一個繞Y軸轉動的自由度,兩個眼瞼的兩個自由度是分開的,所以共有兩個自由度 ,因為在裝完眼球后剩下的空間比較小,還不能和眼球發生干涉,所以要在有限的空間內加入眼瞼的結構,不能太過于復雜,選擇了一級傳動。
每條眉毛應該具有五個自由度,分別是左端兩個,右端兩個和中間一個。但是,左右兩端在Y軸方向的自由度,運動范圍很小,幾乎對表情起不到明顯可見的作用。而且,對于一條眉毛來說,五個自由度的機構過于復雜。因此,本設計中將其簡化成一個自由度,即眉毛左、中、右三點的Z 方向自由度。
嘴這個部分總共有六個自由度的運動,包括左右嘴角各有一個X向和Y 向的直線運動,上、下唇各有一個Z 向直線運動。這部分的機構部分基本都安置在嘴與眼之間的空間里。另外,兩個嘴角處的Y 向運動軌跡并不是在Y 一Z平面上,而是與該平面成大約150 度角。同是直線運動,這里采用了與眉毛相類似的機構。
下顎部分只有一個繞Y 軸旋轉的自由度,從結構上看比較簡單,由伺服電機直接驅動,但是因為整個下顎組件質量以及相對轉軸的力臂較大,造成該機構所需驅動力矩較大。另外,該機構還需要能夠自鎖,即在停止工作和任何時候電機停轉時,下顎必須保持在原位不動,所以下顎機構在面部來說是負載最大的一部分。
機構分析為了使機器人的表情更加靈活生動,增加了頸部的運動。機器人頸部共有兩個自由度,分別是繞Y , Z 軸旋轉。本設計采用,在頸部接近頭部的位置安裝伺服電機,分別驅動繞 Y 軸的旋轉,在最下部的位置,即基座內安裝頸部第二個伺服電機,驅動整個機器人頭、頸部繞Z 軸旋轉的運動。
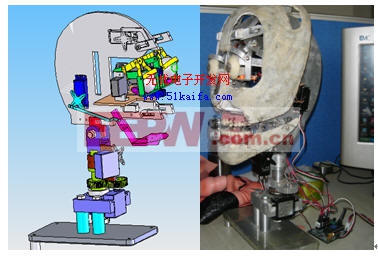
圖1 情感機器人頭
4系統概述
類人機器人需要具備的特點有:與人類似的傳感系統、語音接收、圖像接收、感覺系統等等。有類似人的外形,有類似人的思維和行為。
于是我們設計了一個系統,系統中的東西很多,如圖2所示是一個硬件的結構圖。整個系統分為三大部分:
1、攝像頭和無線話筒,屬于媒體設備。視覺和聽覺,是人和人之間交流的非常重要的部分。因此仿人機器人也應該具有該項功能,于是我們就要用攝像頭和話筒來接收這些信息。而圖像處理和語音識別是一個非常復雜而又繁重的工作,嵌入式系統完成該項工作就比較困難,我們計劃將攝像頭采集來的圖像和聲音通過無線視頻設備和無線話筒傳送給PC機,用PC做圖像處理和語音識別。用PC機對圖像和語音進行處理之后,根據我們事先定義好的控制協議來控制機器人。
2、PC機。接收圖像和語音信息,并進行圖像處理和語音識別,根據協議轉換成控制指令。對于處理好的控制指令和數據,我們通過無線和有線兩種方式傳給嵌入式系統,嵌入式系統根據定義好的控制指令和數據來執行操作。同時PC機也可以接收嵌入式系統發送過來的數據,并對數據進行分析和處理。
3、嵌入式系統部分。嵌入式系統有兩個功能:首先是對機器人的實時控制和接收來自PC機的數據和控制指令,其次采集機器人目前的狀態,主要的傳感器有攝像頭、麥克和語音輸出。考慮到機器人的體積和處理能力的要求,我們采用了性能穩定可靠,同時運算能力較強的PIC系列單片機。
根據舵機控制的需求,我們要對控制器進行選擇,還要考慮控制對象精度,力矩要求,控制器重量等。根據上面的要求,選用PIC16F877作為主要的控制芯片【4】。
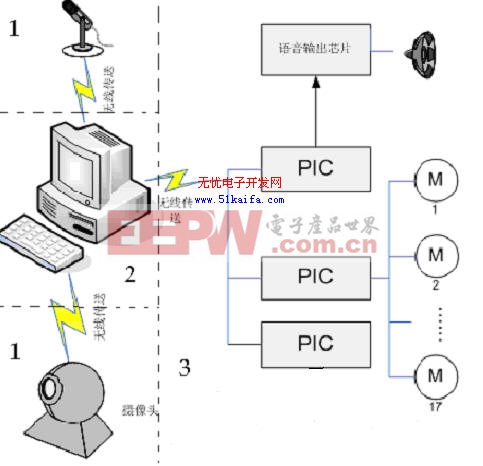
圖 2 系統硬件結構
下位機PIC控制多舵機運動。PIC控制程序流程圖如圖3。

圖3 程序流程圖

圖4 樣機
表情機器人樣機如圖4。
5結論
本文以生物學為基礎,以多種學科技術相融合的方法提出了研究情感機器人的一種新方法,雖然受到現實環境的制約,機器人的表情還比較粗陋,不夠細膩,但完全按照真實人的外貌來制作機器人在國內還是首次。在這個機器人的基礎上,我們要進一步細化機器人的表情,最終達到服務型機器人的標準。
參考文獻
[1] Mori, Masahiro (1970). Bukimi no tani the uncanny valley. Energy, 7(4), 33C35. (In Japanese)
[2] http://www.androidworld.com
[3] 加藤介陽,原文雄.Face Robot Mark Ⅲ Platform for Experiments of Communicative Interaction with Humans.2002
[4] 劉濤.基于遺傳算法的雙足步行機器人步行姿態控制策略.微計算機信息,2006,7-2, 252-254.

伺服電機相關文章:伺服電機工作原理








評論