基于紅外傳感器的智能車系統設計

摘要:以飛思卡爾半導體公司的MC9S12DGl28B系列MCU為核心,設計智能車的系統框架,軟件和硬件的設計方案。詳細介紹了電源模塊和電機驅動模塊在設計過程中遇到的問題和解決方案。
關鍵詞:智能車;HCSl2單片機;紅外傳感器
0 引言
“飛思卡爾杯”智能車大賽起源于韓國,是韓國漢陽大學汽車控制實驗室在飛思卡爾半導體公司資助下舉辦的以HCSl2單片機為核心的大學生課外科技競賽。組委會提供一個標準的汽車模型、直流電機和可充電式電池,參賽隊伍要制作一個能夠自主識別路徑的智能車,在專門設計的跑道上自動識別道路行駛,誰最快跑完全程而沒有沖出跑道并且技術報告評分較高,誰就是獲勝者。其設計內容涵蓋了控制、模式識別、傳感技術、汽車電子、電氣、計算機、機械、能源等多個學科的知識,對學生的知識融合和實踐動手能力的培養,具有良好的推動作用。我校于2007年8月參加第三屆大學生智能模型車競賽,并取得三等獎的好成績。
1 系統分析
智能車系統一般由電源模塊、傳感器模塊、直流電機驅動模塊、路徑識別模塊、通訊及調試模塊、單片機模塊等組成。
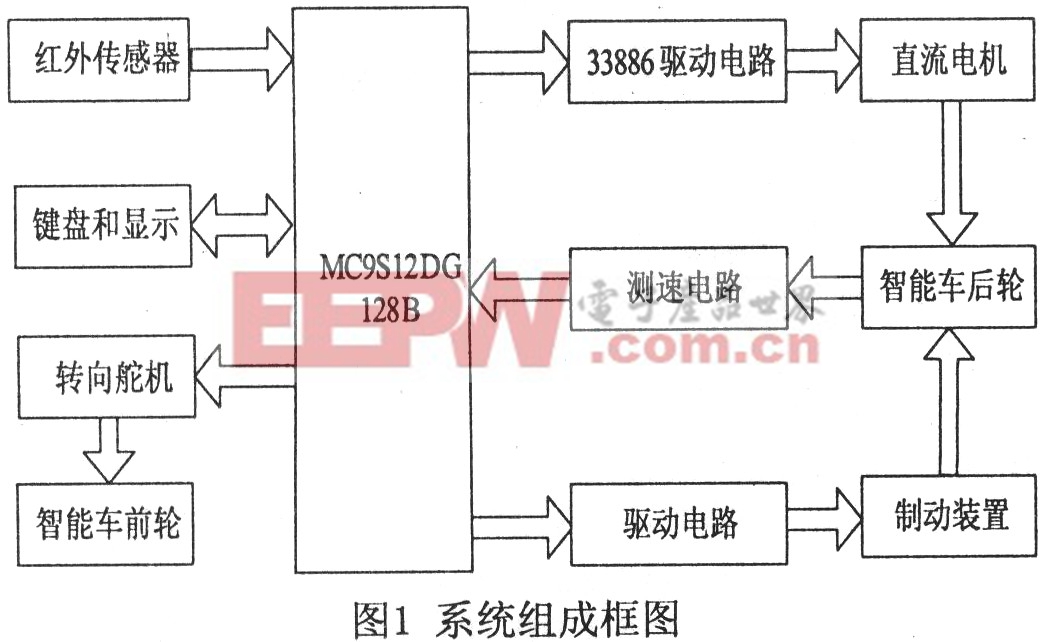
本智能車的核心處理單元采用飛思卡爾半導體公司的MC9S12DGl28B系列MCU,系統框圖如圖l所示,本智能車的設計采用了多模塊技術:運用反射式紅外傳感器設計路徑檢測模塊和速度監測模塊;采甩PWM技術,控制舵機的轉向和電機轉速:系統還擴展了液晶顯示屏和鍵盤模塊實現人機交互操作,以便于智能車的相關參數調整。此外,PID尋跡算法結合ABS(Anti―skid Brake System.:防抱死系統)技術,使我們的小車能在曲折的賽道上以較快的速度穩定行駛。
2 系統硬件設計
2.1 電源部分硬件各部分所需的電源大小不一樣,為滿足這一要求,本系統對電源部分進行設計。供電電源為配發的標準車模用7.2V 2000mAh Ni―cd蓄電池,通過穩壓芯片分別提供6V、5V電壓以及接地端。6V穩壓電路如圖2所示。其中6V電壓供給伺服電機,5V的電壓供給單片機系統、路徑識別的光電傳感器和接收器電路、車速傳感器電路,LCD顯示電路。在電路設計中,考慮到由于電機驅動所引起的電源輸出不穩定(主要為瞬態脈沖),在電源輸出端,各芯片電源引腳都加入了濾波電路。為了避免由于驅動電機轉動時所引起的電磁干擾,在印制板上做了敷銅處理,將電路中的“地”與敷銅面相連接。

2.2 信息采集模塊在該模塊中包括速度信息采集和位置信息采集兩個子模塊,分別采集智能車當前的位置信息和速度信息,并將采集到的信息傳給MCU,其核心是反射式紅外傳感器。測速傳感器安裝于智能車右后輪附近,在靠近車輪的軸上貼一黑白相問、36等分的圓盤,用反射式紅外傳感器檢測黑線,通過對黑色標志的記數可得車輪轉過一周所用的時間T,通過公式進行計算即可得到智能車當前的運行速度V。
2.3 信息處理模塊信息處理模塊包括信息處理和控制模塊,其核心是MCU,MCU接收到采集來的信號,對信號進行處理后作出判斷,并發出控制命令。
2.4執行模塊該模塊包括了驅動電機和舵機,當接收到MCU的命令后便執行相應的操作,同時信息采集模塊又采集到電機和舵機的狀態信息,反饋給MCU。從而整個系統構成一個閉環系統,在運行過程中,系統自動調節而達到正確行駛的目的。
用芯片MC33886來驅動電機,通過調節加在電機兩端的電壓控制電機的轉速從而控制小車的速度。利用芯片的全橋控制,對電機進行反接制動。由實驗知,使用單片芯片的時候發熱嚴重,以至芯片過熱而自動保護。為此我們采取了三項措施來解決芯片發熱問題:一、多片并聯,減小單片的通過電流;二、在MC33886上部加裝散熱片;三、在電路板上留有大片覆銅區,通過片子的下部與覆銅區緊貼,進行散熱。為了提高散熱效果,在片子的上下表面都涂有導熱硅脂,使其與散熱片和覆銅區緊貼。由實驗知,驅動芯片能夠穩定運行。
2.5人機交互模塊 在該模塊中包含了按鍵輸入與LCD液晶顯示,其中按鍵用于調節小車的工作模式,同時也用于調節小車行駛時所需的一些參數;結合LCD液晶顯示,從而使整個小車系統更具人性化。
3 系統軟件設計
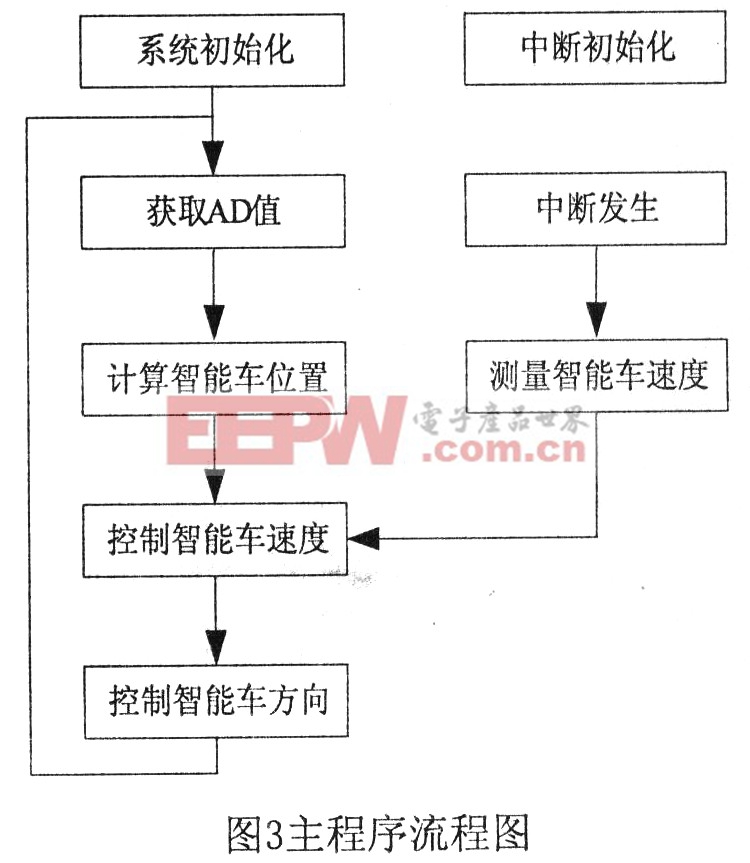
軟件設計是整個系統的重要組成部分之一,軟件設計是否合理直接影響智能車能否穩定行駛。飛思卡爾MC9S12DGl28B系列單片機可使用C語言和匯編語言來編寫源代碼,使用C語言編寫更為簡單和易于移植。在IAR環境下編寫源代碼,經編譯生成十六進制文件后可以通過JTAG下載到程序存儲器中,并且可以在線調試和修改,大大提高了開發效率。本系統軟件包括主程序、系統初始化子程序、液晶顯示屏子程序、按鍵子程序、定時器中斷服務程序等。各子程序可以完成相對獨立的功能,而主程序需要完成以下任務:
(1)初始化各功能子模塊:
(2)檢測用戶按鍵輸入;
(3)調用各子模塊的功能;
(4) 協調分配各子模塊占用的系統資源。其系統控制流程如圖3所示。
4 結束語
本論文結合實際設計經驗,從智能車的硬件設計、軟件設計等方面討論了智能車如何能夠平穩運行。在設計中筆者發現選擇合適的器件、選用合理的控制算法、設計合理的軟件程序是決定智能車能否快速、平穩行駛的關鍵。












評論