基于捷聯慣性導航的組合導航系統研究

 本文引用地址:http://www.104case.com/article/163817.htm
本文引用地址:http://www.104case.com/article/163817.htm1.2 系統的狀態方程
本系統取東北天坐標系為導航坐標系,以SINS導航參數誤差作為系統狀態變量X。
系統的狀態方程為:

δKD]T,ψ為姿態誤差角,δvn為系統速度誤差,δp為位置誤差,δKG為陀螺儀刻度系數誤差,εb為東北天向陀螺零漂,δKA為加速度計刻度系數誤差,△b為東北天向的加速度計的零偏,δpD為里程計的位置誤差,δKD為里程計的刻度系數誤差。F(t)為系統狀態變量的系數矩陣。G(t)為系統噪聲系數矩陣,w(t)為系統噪聲矩陣,它是均值為零、方差為Q的白噪聲矢量。
1.3 觀測方程的建立
SINS與里程計的自主式組合導航系統采用速度組合方式時,里程計的速度量測值經過刻度系數誤差及姿態誤差角修正后分解到導航坐標系,與SINS的速度量測值進行對比,構成卡爾曼濾波器的觀測量,利用卡爾曼濾波技術進行誤差估計和校正,具體的系統量測方程為:

式中:v(t)為量測噪聲矢量,它是均值為零、方差為R的白噪聲矢量,且假設v(t)和w(t)是互不相關的。
2 實物試驗的結果及分析
水下試驗使用的是裝有組合導航系統并且頂部帶有標桿的導航試驗車。環境是一個200 m2的水池,試驗車全程約20 min,速度約為0.1 m/s,以水池東向位置的中心為起點,以東向位置為基準,每隔5 m記錄試驗車的位置數據。
記錄數據如表1所示。
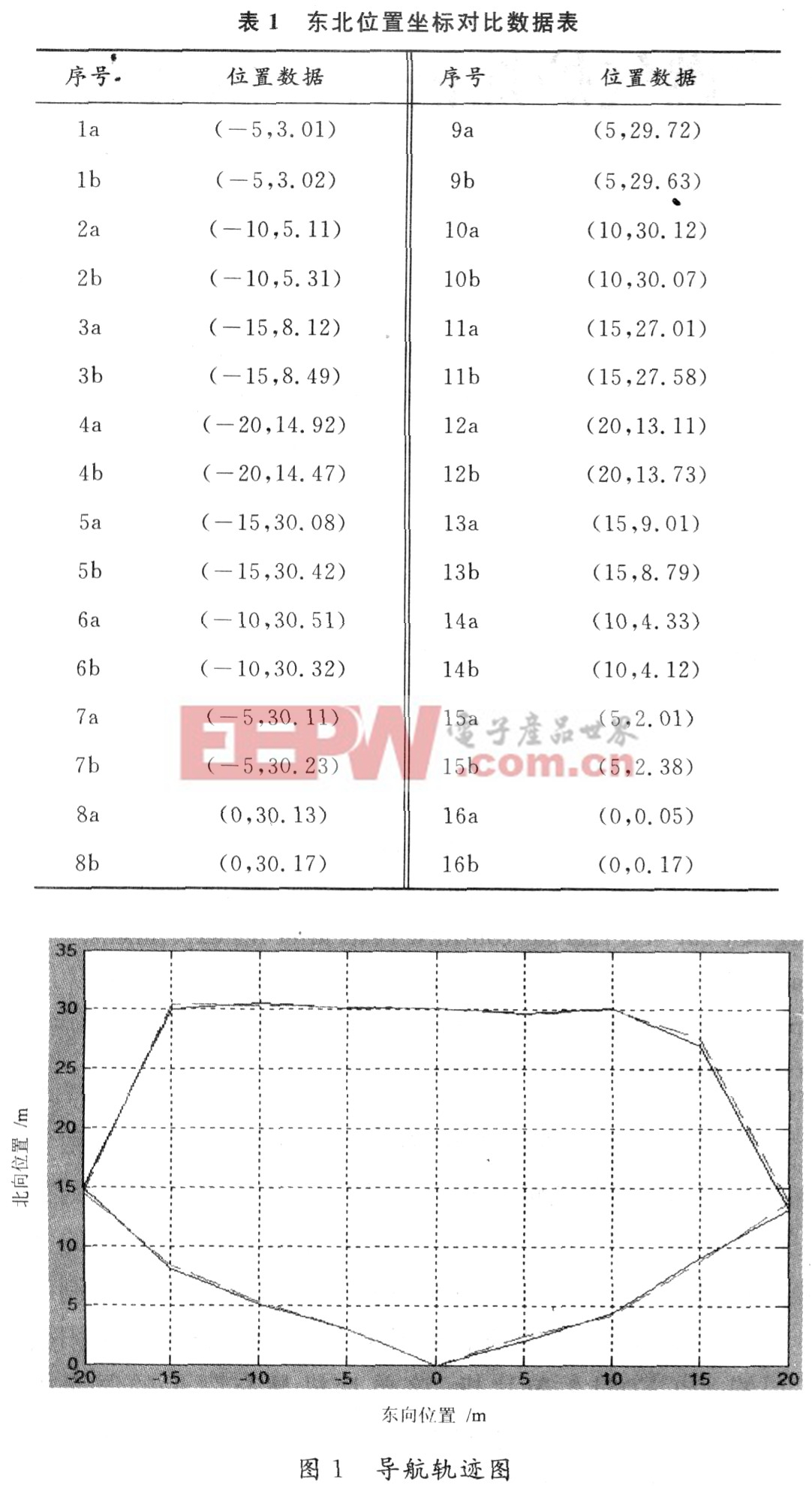
表1中:a組數據為組合導航系統采集得到的位置坐標數據;b組數據為試驗車頂部標桿測得的位置坐標數據。
根據表1中的數據繪制的導航軌跡圖如圖1所示。
圖1中,黑色實線是依據慣導組合采集試驗車的位置數據繪制的;紅色虛線是依據試驗車頂部標桿測量得到的試驗車的位置數據繪制的。根據表1中的數據獲得北向位置誤差數據如表2所示。

根據表2中的數據得到組合導航系統的最高北向位置誤差O.62 m,可以得出利用里程計來輔助SINS進行導航能夠使系統達到較高的定位精度。
3 結 語
SINS/0D組合導航系統,能解決SINS導航位置誤差隨時間明顯累積的缺點。組合導航系統具有較好的定位功能,且有較強的抗干擾能力和自主性,該自主式組合導航系統對水下輪式車輛的導航有一定的實用價值。






評論