高頻軟開關靜止變流器并聯研究

表1給出了該系統在輸入直流母線電壓為額定電壓27V時,負載分別為阻性和感性情況下的實驗數據。
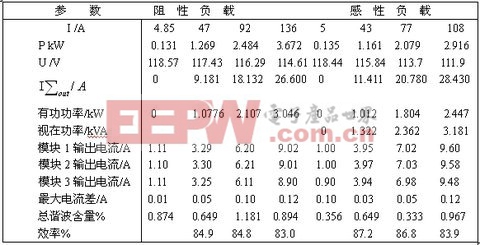
圖5給出系統在阻性額定負載(3KW),航空靜止變流器輸出電壓U0和3個逆變模塊的輸出電流i01,i02,i03的波形。(不均衡度優于1.31%)。圖6給出系統在感性額定負載(3KWA)(cosφ=0.766),航空靜止變流器輸出電壓U0和3個逆變模塊的輸出電流i01,i02,i03的波形。(不均衡度優于0.09%)。
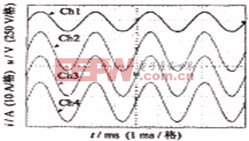
圖5 阻性額定負載下,逆變器輸出電壓及各模塊輸出電流波形
說明::圖5中Ch1為輸出電壓U0(250/格),Ch2為模塊1的輸出電流i01(10A/格);Ch3為模塊2的輸出電流i02(10A/格),Ch4為模塊3的輸出電流i03(10A/格);時基為1ms/格。
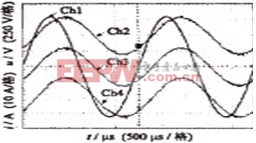
圖6 感性額定負載下,逆變器輸出電壓及各模塊輸出電流波形
說明:圖6中Ch1為輸出電壓U0(50V/格)時基為500μs/格,Ch2為模塊1的輸出電流i01(10A/格),Ch3為模塊2的輸出電流i02(10A/格),Ch4為模塊3的輸出電流i03(10A/格)。
從上述實驗數據和波形可以看出::利用該種方法實現航空靜止變流器并聯,對于阻性負載及感性負載具有較好的均流性能,不均衡度優于2%。
在本系統中,由于所有并聯模塊都跟蹤統一的電流給定,保證了各模塊的電流相位和幅值均能一致,。因此,并聯模塊間的均流精度較好,并且,在突加突卸負載時,整個系統都能保持穩定,并聯模塊間的均流精度不受影響。另一方面,由于所有并聯模塊均為電流型模塊,插入及拔出系統時對系統的輸出電壓影響很小,因此,該系統的熱拔插設計較電壓型模塊的并聯熱拔插設計要方便得多。同時,可以采用文獻5中的分散邏輯方案實現控制冗余。
4 結 論
本文對基于主從控制的電流控制型逆變器并聯系統進行了研究,經過分析和實驗可以得出以下結論:
(1)對基于電壓、電流雙閉環控制的逆變器,可采用公用電壓環的方案構成主從式并聯系統;
(2)公用電壓環的方案構成主從式并聯系統動靜態特性較單模塊有所提高;
(3)電流瞬時控制提高了系統的動態響應速度,輸出電壓的失真小;
(4)并聯系統的輸出阻抗變小,輸出功率與并聯模塊數量成正比;
(5)模塊間環流的大小與各模塊的電流環放大倍數以及輸出濾波電容的誤差成正比。保證各模塊的電流環放大倍數以及輸出濾波電容一致,便能很好實現各模塊間電流的均分;
(6)并聯模塊數的增加并不影響各模塊的均流精度,因此這種控制方式沒有限制并聯模塊數量,能方便地實現電源系統的擴容和冗余,有很好的應用前景。

評論