全方位移動機器人模糊PID運動控制研究

因為輪子為對稱分布,常數δ為45。,故得到全向移動機器人的運動模型:本文引用地址:http://www.104case.com/article/163808.htm
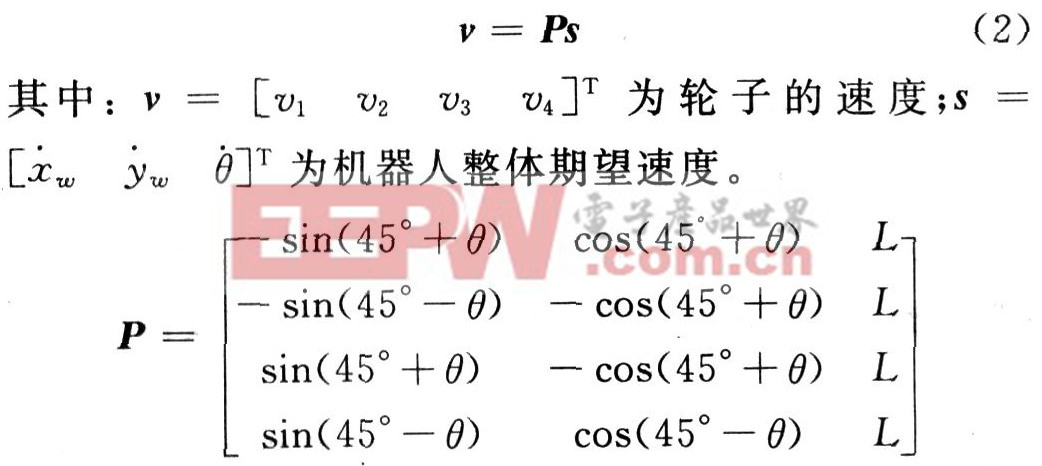
P為轉換矩陣。
這樣,就可以將機器人整體期望速度解算到4個輪子分別的速度,把數據傳送到控制器中,可以完成對機器人的控制。
2 基于模糊PID的運動控制器設計
目前,常規PID控制器已被廣泛應用于自動化領域,但常規PID控制器不具備在線整定控制參數忌kp,k1,kD的功能,不能滿足系統的不同偏差對e和偏差值變化率ec及對PID參數的自整定要求,因而不適用于非線性系統控制。
結合該運動控制系統的實際運行條件,設計采用模糊PID控制方法來實現快速移動機器人車輪轉速大范圍誤差調節,將模糊控制和PID控制結合起來構成參數模糊自整定PID算法用于伺服電機的控制,使控制器既具有模糊控制靈活而適應性強的優點,又具有PID控制精度高的特點,使運動控制系統兼顧了實時性高,魯棒性強及穩定性等設計要點,并可通過模糊控制規則庫的擴充,為該運動控制系統方便添加其他功能。
2.1 參數模糊自整定PID的結構
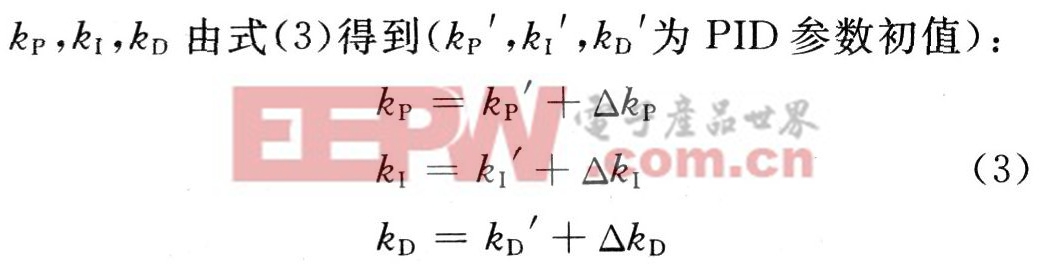
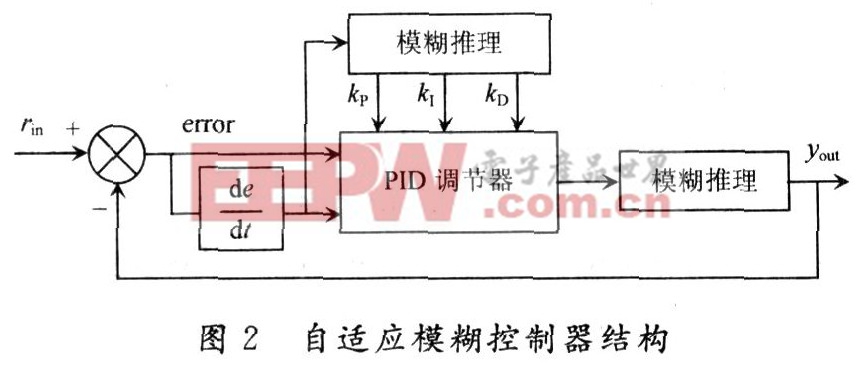
模糊PID控制系統結構框圖如圖2所示,系統的輸入為控制器給定輪速,反饋值為電機光電碼盤反饋數字量,ΔkP,Δk1,ΔkD為修正參數。PID控制器的參數kP,k1,kD。由式(3)得到(kP',k1',kD'為PID參數初值):
由此,根據增量式PID控制算法可得到參數自整定PID控制器的傳遞函數為:

2.2 速度控制輸入/輸出變量模糊化
該速度控制器的輸入為實際轉速與設定轉速的偏差值e,以及偏差值的變化率ec;輸出量為PID參數的修正量ΔkP,Δk1,ΔkD。它們的語言變量、基本論域、模糊子集、模糊論域及量化因子如表1所示。
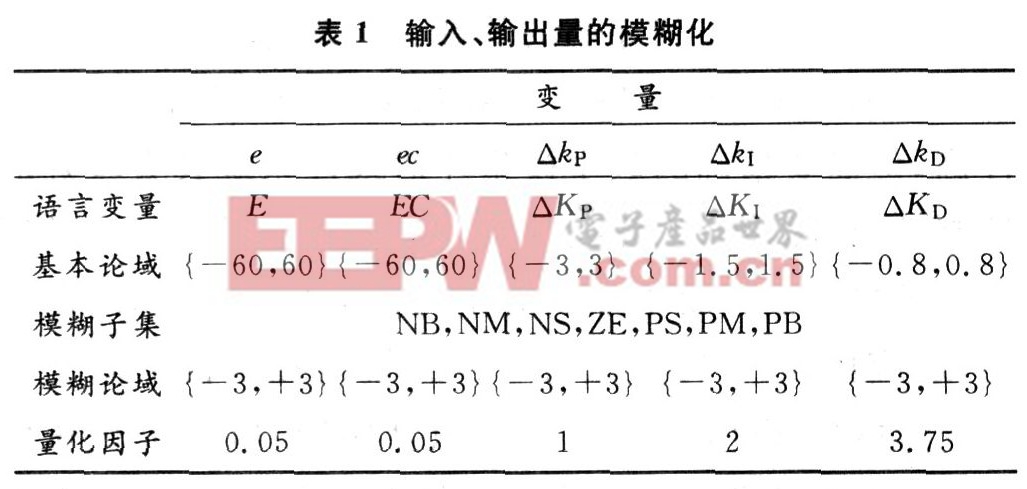
在模糊變量E和EC以及輸出量ΔKP,ΔK1,ΔKD,的語言變量和論域確定后,首先必須確定模糊語言變量的隸屬度。常用的隸屬函數有B樣條基函數、高斯隸屬函數、三角隸屬函數等,考慮到設計簡便及實時性的要求,采用了三角隸屬函數。










評論