用于Quad-rotor飛行器的無刷直流電機驅動系統整體設計

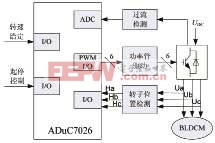
如圖3所示。轉子位置檢測電路用來檢測無刷直流電機轉子的位置信號Ha、Hb和Hc,送入微處理器,在微處理器中計算得到電機的轉速,與給定轉速比較,處理后給出相應的功率開關管控制信號,與PWM高頻載波邏輯合成后,控制電子換相線路中開關管的通斷,從而實現電機的連續旋轉及閉環調速。本文中,轉速計算采用測周法,電子換相線路是由6個MOS管組成的三相全橋逆變電路。為避免電機過流損壞,由電阻在電路中采樣后,經A/D引腳輸入微處理器得到電路的電流值,若此值過大,則由軟件控制停止電機。
軟件設計
(1)起動程序。由軟件實現電機外同步變頻加速起動,當電機達到一定轉速時(反電勢檢測信號已清晰可靠),再由軟件切換至內同步,即三相六狀態運行。
(2)運行程序,包括轉子位置獲取電路,閉環調速程序。轉子位置檢測電路輸入到微處理器,檢測到的反電勢過零點信號經ADuC7026處理后輸出控制信號,控制功率開關電路通斷。轉子位置檢測電路中的低通濾波環節會使反電勢過零點信號發生相移,因此,要對反電勢過零點信號進行相位檢測并且根據轉速給出相應的相位補償,使電機運行可靠、高效。
部分程序流程圖如圖4所示。
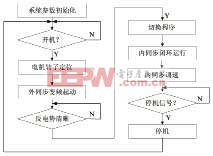
圖4 主程序的流程圖
實驗結果及分析
實驗調試中,使用的無刷直流電機端電壓最大值是18V,KV值是900rpm/V,功率710W,定子相數為3,轉子極對數為7。
微控制器發出控制信號控制功率開關電路,起動部分采用180°導電制,控制波形是占空比為50%的方波。實際測得其中一路控制信號的波形如圖5(a)所示,其占空比為50%,與理論相符合。
控制波形經過邏輯合成及緩沖后用于控制功率開關電路的各MOS管,本設計中上橋臂的三個MOS管采用PWM控制,實際得到的功率開關管控制波形如圖5(b)所示。
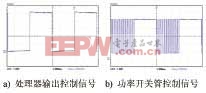
圖5 開關管控制信號的獲得
在內同步調速時,用示波器同時測量微處理器發出的控制信號的波形和反電勢過零點的信號波形,如圖6所示。逐步提高PWM的占空比,即端電壓,則控制信號頻率隨著PWM占空比的增加而同步提高,即電機的轉速不斷上升,實現了閉環PWM調速,波形調速穩定可靠,轉速可達9000r/min,可以滿足飛行器的高速、高精度要求。
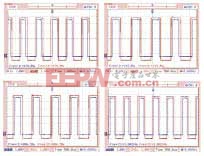
圖6 隨電壓增加控制波形和反饋信號波形變化
結語
本文采用ADuC7026作微處理器,給出了一種用于Quad-rotor飛行器的無刷直流電機驅動系統控制方案。實驗結果證明該驅動系統能夠很好的起動,并能夠準確檢測轉子的位置信號,實現準確換相,使電機平穩、高速運行,該驅動系統滿足飛行器要求的高速性能要求,調速范圍寬,且電機運行平穩、可靠,魯棒性強。












評論