基于模糊PID皮革收縮溫度測定儀控制系統設計

在對參數模糊自整定PID控制器輸出信息模糊判決時,偏差的基本論域取為[-3,3]以及偏差所取的模糊集合的論域為[-n,…,0,…,n];偏差變化率的基本論域為[-ec,ec]以及誤差所取的模糊集合的論域為[-n,…,0,…,n];其中e,ec表征誤差大小的精確量,n是在0~e(0~ec)范圍內連續變化的誤差離散化后分成的檔數(在實際控制系統中e≠n,ec≠n)。為進行模糊化處理,必須利用偏差量化因子ke和偏差變化率量化因子kec將輸入量由基本論域轉化到模糊集的論域,則偏差量化因子ke和偏差變化率量化因子kec計算公式:本文引用地址:http://www.104case.com/article/163736.htm
![]()
在儀器中,由于皮革收縮溫度測定儀的溫度控制系統要求上升速率在0~3℃/min范圍之內,為了達到要求,對不同的上升速率,偏差采用不同的量化因子。例如,當上升速率為2℃/min時,采樣時間O.3 s;當上升速率為0.01℃/0.3 s時,e的基本論域取[-0.02,0.02],模糊集合的論域取n=2,e的量化因子ke=2/0.02=100,ec的基本論域取[-0.01,0.01],ec的量化因子kec=2/0.01=200。
在參數模糊自整定PID控制器原理圖中,對建立的模糊控制規則要經過模糊推理才能決策出控制變量的一個模糊子集,它是一個模糊量而不能直接控制對象,還需要用合理的方法將模糊量轉化為精確量(解模糊化),以便最好地發揮模糊推理結果的決策效果。在解模糊化時,采用重心法(式(4)),得到控制量“控制被控對象。

![]()
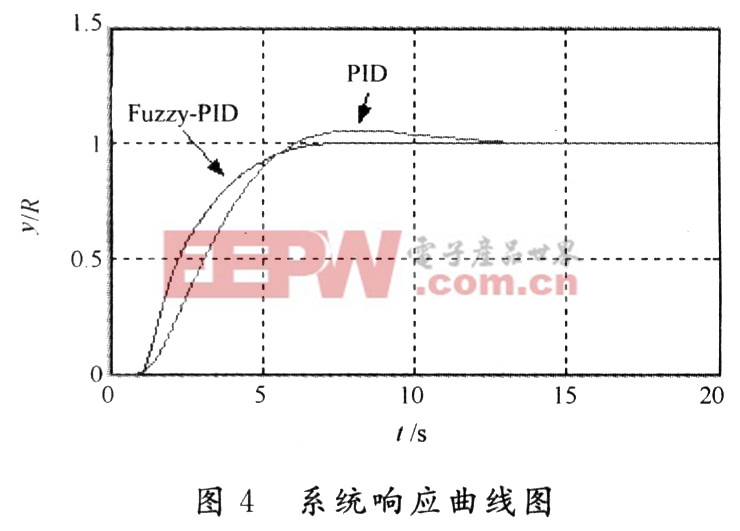
在Matlab的Simulink環境下,建立參數模糊自整定PID控制器和常規PID控制器的系統圖進行系統仿真實驗。參數模糊自整定PID控制器仿真曲線圖和常規PID仿真曲線圖如圖4所示。通過系統響應曲線圖,從系統的性能指標進行分析,參數模糊自整定PID控制器能有效地抑制了超調,同時也使皮革收縮溫度測定儀溫控系統實現無靜差跟蹤,其控制效果優于常規PID控制器的控制。
3 結 語
仿真結果表明,參數模糊自整定PID控制系統提高了皮革收縮溫度測定儀溫度控制系統的靜態性能和動態性能,使溫度控制系統具有較強的魯棒性,自適應性,有效地解決了溫度控制系統的溫度漂移問題且具有較強的抗干擾性能。








評論