電機軟啟動自整定模糊控制器的研究與設計



4.3 模糊控制器參數自整定
在啟動過程中遵循的自整定規則如下:
當e和ec較大時,縮小K1和K2,降低對大偏差的分辨率,減少偏差,縮短過渡過程時間。當e和ec較小時,系統已接近穩態,這時應增大K1和K2,提高系統對小偏差的分辨率,提高控制的靈敏度;當誤差e較大,且與誤差變化ec符號相反時,應適當增大控制器k3的大小。當誤差e較大,且與誤差變化ec符號相同時,系統響應正加速偏離設定值,為減小這種不利趨勢,也應適當減小K3。系統響應在設定值附近時(此時誤差e較小),為防止產生較大的超調或欠調,K3應該具有較寬的變化范圍。適當減小比例因子以減小超調。經過多次仿真和實驗,隨著偏差Ke和偏差變化率Kec的變化,K1、K2和K3分別按表5、6、7取值,可以得到理想的控制結果。

5 系統仿真與分析
利用MATLAB的Simulink和SimpowerSystems、FuzzyLogicToolbox等工具進行的系統仿真。
5.1 仿真模型的建立
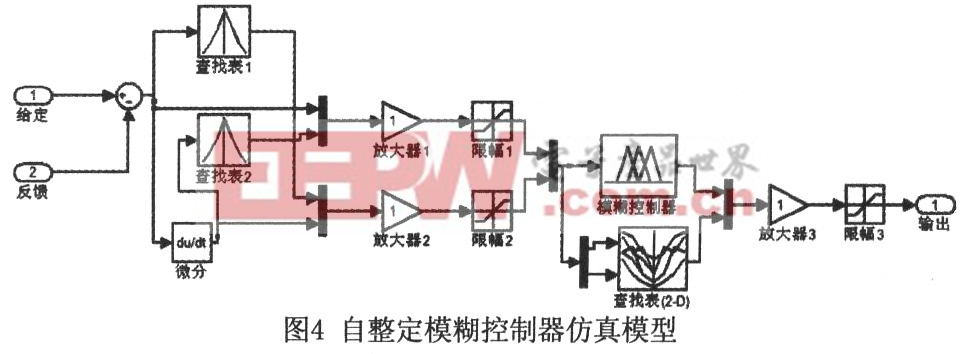
結合上述的方法建立的自整定模糊控制器仿真模型如圖4:
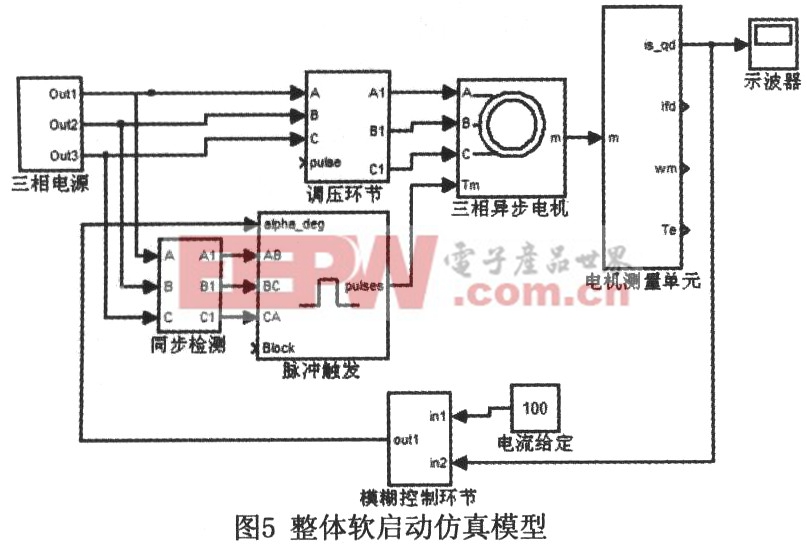

結合三相電源模塊、同步環節模塊、脈沖發生環節模塊、三相交流調壓環節模塊以及控制環節得到整體軟啟動仿真模型如圖5。
將采用傳統PID控制器獲得的響應曲線和采用自整定模糊控制器獲得的響應曲線對比可知,采用自整定模糊控制器獲得的控制效果更為理想,具體表現為:超調量較小、啟動過程平穩,其輸出量幾乎和給定量達到重合。通過以上的對比可知,自整定模糊控制器的控制性能優于傳統PID控制的控制性能,同時,也說明了本文設計的自整定模糊控制器獲得了較好的控制效果。
6 小結
本章結合電動機軟啟動的特性在吸取自適應和模糊控制算法各自優點的基礎上,介紹了限流軟啟動自整定模糊控制器設計的整個過程;并對整個軟啟動控制系統進行了動力學建模,最后,利用MATLAB的power system模塊庫以及Simulink模塊庫建立仿真模型功能進行了系統仿真,仿真結果表明,自整定模糊能夠在軟啟動控制上取得較好的動、靜態性能。











評論