CAN總線在電梯遠程監控系統中的應用

與采集卡相連接16塊電梯通訊卡,在初始化時,將地址接收碼與屏蔽碼設置為只接收采集卡發送的數據。當通訊卡接收到采集卡發來的站號后,與自己的站號相比較,如果不同則不予理睬,如相同則發送電梯狀態數據到總線上。而采集卡在初始化時設置未為接收所有通訊卡的數據,當他接收總線上的數據,確認是否是所采集的電梯發送來的數據,如果正確,則進行協議轉換,將從電梯通訊卡接收來的數據轉化為符合上位機要求的格式;然后根據這些狀態信息,對電梯進行故障診斷,判斷電梯是否正常運行,如果不正常,則判斷發生了什么故障,或者可能會要發生什么故障,進行故障報警或預報警;故障判斷等處理后,將故障碼和其他數據一起發送給上位機,否則放棄這次操作。
在CAN總線通信中,初始化模塊較為重要,是一個重點,也是難點。在初始化時,首先進入復位模式,然后對CAN控制器的寄存器配置。但在實際中發現硬復位較可靠,只要時間足夠,一定能使CAN控制器進人復位狀態,但此時CAN控制器的某些寄存器的值不確定。軟復位正好相反,不一定能使CAN控制器進人復位狀態,但一旦進人復位狀態則CAN控制器的寄存器數值就為確定的復位值。在實際應用中此兩種復位方法結合使用效果好。因此,在硬件電路中還設計了Watchdog電路,它同時還可以防止單片機死機或者程序出現“跑飛”現象發生。初始化程序流程圖如圖2所示,采集卡整體程序流程圖如圖3所示。

圖2 CAN總線初始化模塊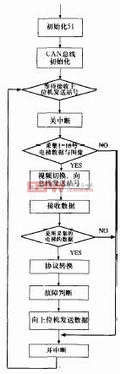
圖3 采集卡流程圖
轉換卡與工作站通信過程
采集卡與工作站之間通過RS-232總線進行通訊,MCU串口波特率為19200bs,工作站監控軟件采用VisualBasic和SQL,將其MSComm控件的Settings屬性設置為“19200,E,8,1”。使用串口與工作站連接,從速率上可以滿足遠程監控系統的要求,而且可以降低成本。如果使用基于PCI總線的CAN總線適配卡,盡管可以提高通信速率,但是也增加了不少成本,況且,還要將協議轉換和故障判斷的任務移交給上位機,增加了上位機的負擔,會影響整個系統的實時性。綜合比較,還是CAN-232的性價比較高,適合本系統的使用。監控軟件每隔40ms可以得出如圖4的旋轉角=∠AOC和俯仰角=∠COB,為了使求出的角度與COMPASS得出的角度協調,以正北為零度來進行角度調制,角度范圍從0~359.9。
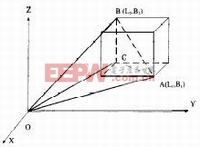
圖4
結論
本系統結構緊湊合理,可以根據需要調整到半球任何的一個位置點。在本系統中,樣機的功率為1.5W,自重2.5kg,可以負載10kg的天線(本系統的天線中0.7kg),轉動速度為每秒4度。該樣機在工程試驗中跟蹤效果比較好,通過軟件來保證運行的可靠性,結果表明響應特性符合要求,精度完全滿足實際需要。











評論