基于虛擬儀器的車用電機測試平臺控制系統(tǒng)

引言
本文引用地址:http://www.104case.com/article/163586.htm能源短缺和環(huán)保問題促使人們轉(zhuǎn)向開發(fā)低污染或者零污染的清潔汽車。燃料電池汽車被認(rèn)為是最有希望替代內(nèi)燃機汽車成為下一代公路運輸工具的主流。無論是純電動、混合動力還是燃料電池汽車,都以電動機作為驅(qū)動力源。一套適用的車用驅(qū)動電機的測試平臺對于整車動力系統(tǒng)的開發(fā)非常重要。然而目前國內(nèi)的電機測試平臺一般不是針對車用驅(qū)動電機而設(shè)計,而且自動化程度不高,無法滿足測試的要求。因此需要開發(fā)一套專用的車用驅(qū)動電機測試平臺,這對于整車動力系統(tǒng)的設(shè)計及優(yōu)化至關(guān)重要。
虛擬儀器技術(shù)是近幾年在自動化測試和控制領(lǐng)域發(fā)展起來的一項新技術(shù)。其代表產(chǎn)品為美國NI 儀器公司的LabVIEW ,目前在包括汽車行業(yè)的眾多領(lǐng)域得到廣泛應(yīng)用。本文結(jié)合燃料電池轎車的技術(shù)特點和要求,提出了基于虛擬儀器和CAN 總結(jié)技術(shù)的系統(tǒng)集成方案,并設(shè)計了相應(yīng)的控制策略和故障管理機制。
系統(tǒng)功能分析
根據(jù)燃料電池轎車技術(shù)的特點及驅(qū)動電機測試規(guī)范的要求,系統(tǒng)應(yīng)具有以下主要功能:
驅(qū)動電機的外特性測試;
驅(qū)動電機及其控制器的效率測試;
堵轉(zhuǎn)特性測試;
常溫
溫升試驗;
最大制動功率測定;
燃料電池轎車動力系統(tǒng)硬件在環(huán)仿真測試;
轉(zhuǎn)矩響應(yīng)測試;
驅(qū)動電機動態(tài)性能測試;
根據(jù)測試需求,還應(yīng)增加相應(yīng)測試功能。
圖1 為系統(tǒng)集成方案的梯形結(jié)構(gòu)圖。從實現(xiàn)的角度將系統(tǒng)分為4 個層次:應(yīng)用層、控制層、通信層和物理層。
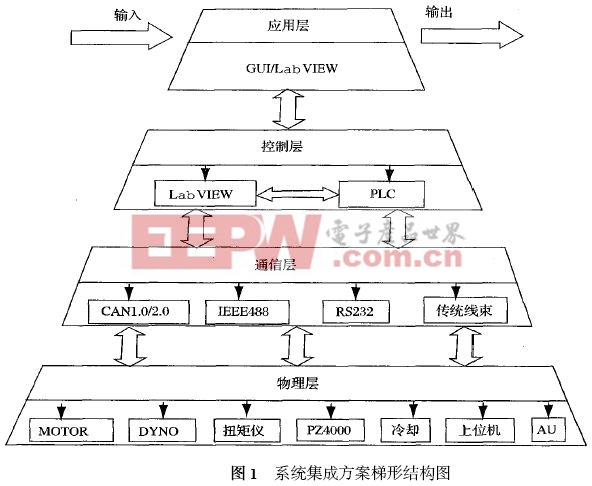
應(yīng)用層
應(yīng)用層即在上位控制機上應(yīng)用LabVIEW 軟件開發(fā)的應(yīng)用軟件。充分利用虛擬儀器技術(shù)的特點,提供了實驗人員與整個測試系統(tǒng)友好方便的交互方式,體現(xiàn)了系統(tǒng)的總體輸入和輸出。
控制層
控制層負(fù)責(zé)對系統(tǒng)的輸入指令進行解釋,控制測試系統(tǒng)按照預(yù)定要求完成測試任務(wù)。控制層從兩個級別上實現(xiàn)對系統(tǒng)的控制:第一級是系統(tǒng)級,即上位機采用LabVIEW軟件編寫的控制程序,目的是實現(xiàn)系統(tǒng)整體的運行控制和通信控制;第二級是組態(tài)級,采用PLC實現(xiàn)系統(tǒng)組態(tài)及具體的控制策略。
通信層
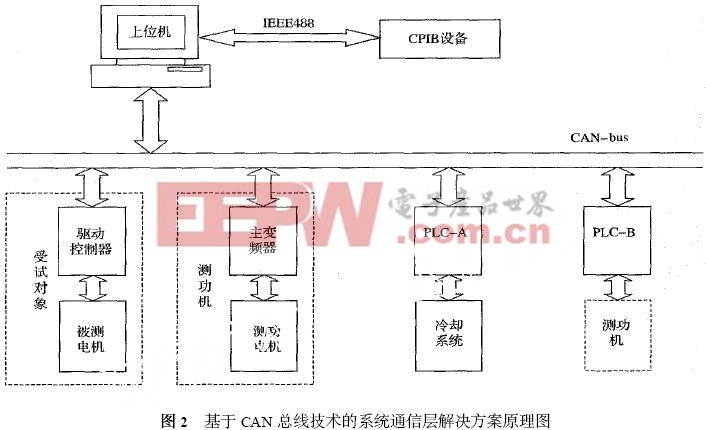
通信層實現(xiàn)了測試系統(tǒng)各部分之間控制指令和信號數(shù)據(jù)的高速可靠傳輸。圖2 為基于CAN總線技術(shù)的系統(tǒng)通信層解決方案原理圖。受試對象、測功機、PLC 終端模塊A、PLC 終端模塊B 以及上位控制機組成一個五節(jié)點的CAN - bus。測功機既可以直接同總線通信,也可以通過PLC 終端模塊B 實現(xiàn)同總線的通信。采用CAN 通信協(xié)議作為系統(tǒng)通信層的骨干框架,既提高了系統(tǒng)可靠性和抗干擾能力,又保證了與整車通信協(xié)議的一致性。同時,為滿足不同測試儀器的要求,系統(tǒng)還提供了對多種通信協(xié)議的兼容性,譬如IEEE488 、RS232 以及傳統(tǒng)線束等。
物理層
物理層是指執(zhí)行具體任務(wù)的各個組成部件,包括受試對象、測功機、扭矩儀、PZ4000 (電量信號數(shù)據(jù)采集處理設(shè)備) 、冷卻系統(tǒng)、上位控制機、AU (包括齒輪箱、強電/ 弱電控制柜、變壓器、電流鉗箱、稀油站等其他輔助設(shè)備) 。
系統(tǒng)電氣控制原理
圖3 為系統(tǒng)電氣控制原理示意圖
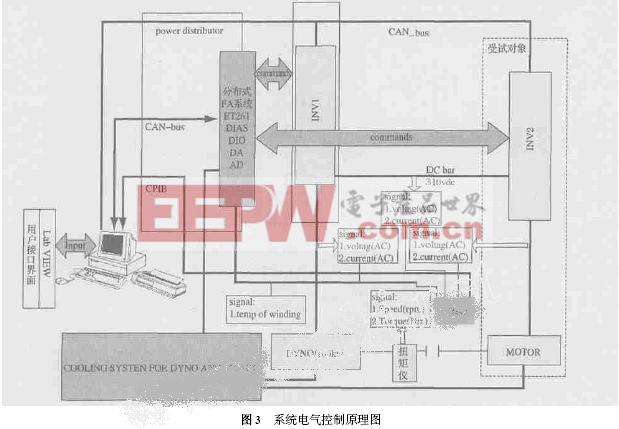
信號采集
受試對象是指被測電機(MOTOR) 及其變頻控制器( INV2) 。主變頻器( INV1) 和測功電機(DYNO) 組成測功機。電量信號采集處理設(shè)備PZ4000 采用GPIB 總線實現(xiàn)與上位控制機的通信。扭矩儀采集的扭矩和轉(zhuǎn)速頻率信號經(jīng)過MP60 (頻率電壓變換器) 送給PZ4000 處理后,再傳送到上位機。
手動模式和自動模式
上位機采用LabVIEW 軟件作為軟件平臺進行整個測試系統(tǒng)的指令輸入及數(shù)據(jù)的采集、分析和記錄,對各終端部件通過PLC 控制模塊進行控制。系統(tǒng)的運行有手動和自動兩種模式,手動模式通過手動輸入控制指令控制系統(tǒng)的運行,自動模式下系統(tǒng)按照預(yù)定控制過程自動運行。兩種模式可以自由切換。試驗中的各種數(shù)據(jù)可以在上位機、PZ4000 上實時監(jiān)控,最終全部由上位機自動記錄。











評論