無動力彈軌跡平滑處理及實現

加權平均法的處理思想是對n項采樣結果取不同的權重,然后相加,其具體的計算方法為:本文引用地址:http://www.104case.com/article/163585.htm

式中:C0,C1,…,Cn-1為各次采樣系數,體現了各次采樣值在平均值中所占的比例。
一般而言,采樣次數愈靠后,取的比例愈大,這樣可增加新的采樣值在平均值中的比例。該方法可根據需要突出信號的某一部分,抑制信號的另一部分。
在此采用8點加權平均法計算跨臨界點的控制變量。如果計算k點的控制變量,則選用8個點的加權系數,即:

這里,采用加權平均法處理臨界點及臨界點前7個點的控制變量。從而把臨界點突兀的控制增量變為漸緩的控制率增量。
4 系統的工程實現
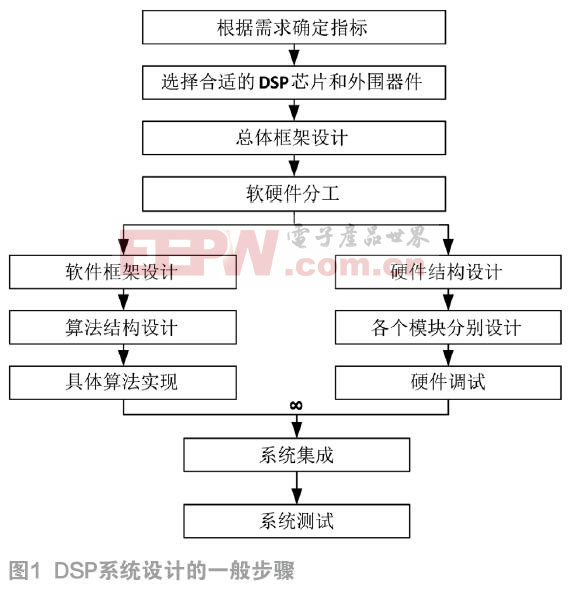
該系統采用TI公司的TMS320F2812作為CPU,用以實現計算、通信、數據存貯、舵機控制等功能。該器件的工作頻率為150 MHz,能夠在較短的時間內(幾十微秒)完成控制變量的計算。圖2給出該系統的硬件框圖。
計算程序所要完成的主要工作是計算控制率,并把控制增量轉化為舵機的偏轉角。根據增量型PID算法和處理臨界點的加權平均法計算控制率和舵機偏轉角。在實際加權平均法計算中,為了提高速度,借鑒滑動濾波的處理方法,即先在RAM中建立一個數據緩沖區,依順序存放8個采樣數據,每采進一個數據,就將最早采集的那個數據丟掉,而后求含新數據在內的8個數據的加權平均值。這樣即可加快數據處理的速度。圖3給出其程序流程圖。
5 實驗及結論
圖4給出某次實驗中通過增量型PID算法計算出飛行過程中每個點的控制變量曲線。由圖4(a)可知,未經平滑的控制變量變化較大,尤其是在臨界點上控制變量發生躍變,從而使彈體失控,造成災難性的后果。圖4(b)給出通過限幅和加權平均法進行平滑處理后的控制變量曲線。
由圖4(b)可見,控制變量較為平滑。這樣的處理結果,使得彈道上相鄰兩個點的控制增量較小,即每次彈體飛行調整的姿態角較小,從而使彈體飛行所需的過載較小,保障了無動力彈的穩定飛行。

pid控制器相關文章:pid控制器原理






評論