模糊控制在基于CAN總線的數(shù)據(jù)采集與控制系統(tǒng)中的應(yīng)用

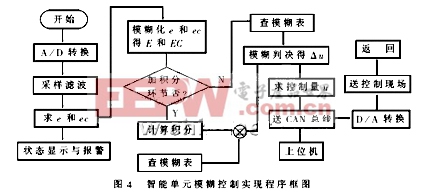
系統(tǒng)軟件所實現(xiàn)的功能為:采樣n時刻A/D轉(zhuǎn)換輸出值,與系統(tǒng)設(shè)定值和上次采樣值e(n-1)比較得n時刻偏差e(n)和偏差變化率ec(n);選擇合適的量化因子ke和kc,由相應(yīng)的模糊化規(guī)則得到模糊值E(n)和EC(n);分析E(n)和EC(n)的變化趨勢以確定是否加入積分環(huán)節(jié)。然后,根據(jù)E(n)和EC(n)的值直接查程序存儲器內(nèi)的模糊控制總表或進行積分運算得到模糊控制增量。最后,對加入或不加入的模糊控制增量采用最大隸屬度原則進行模糊判決,選擇適當(dāng)?shù)谋壤蜃觡u得到控制增量Δu,計算Δu+u(n-1)的值,即可得n時刻的控制量。該值可通過CAN總線傳送給其它智能單元,進行D/A轉(zhuǎn)換后即可控制現(xiàn)場設(shè)備或上位機做進一步的處理以協(xié)調(diào)整個系統(tǒng)各控制單元的正常、有效的運行。智能控制單元在處理以上任務(wù)的同時還要完成與CAN總線數(shù)據(jù)通信和對現(xiàn)場設(shè)備的狀態(tài)顯示與報警。由離線方式計算出的模糊控制總表可以直接以矩陣的形式寫入芯片內(nèi)部程序存儲器,其軟件設(shè)計流程如圖4所示。
4 仿真實驗
針對以上描述的模糊控制算法和控制系統(tǒng)設(shè)計思想,我們選擇某一被控系統(tǒng)做了仿真實驗。該被控系統(tǒng)的傳遞函數(shù)為: 。從系統(tǒng)的傳遞函數(shù)可以看出,該系統(tǒng)非線性較強、純滯后大(T=1s);對純PID控制算法和本論文討論的模糊控制算法的階躍響應(yīng)曲線如圖5所示。
。從系統(tǒng)的傳遞函數(shù)可以看出,該系統(tǒng)非線性較強、純滯后大(T=1s);對純PID控制算法和本論文討論的模糊控制算法的階躍響應(yīng)曲線如圖5所示。
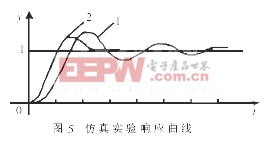
其中,曲線1是在kp=1、kc=0.2和kd=1.25參數(shù)下純PID控制的系統(tǒng)響應(yīng)曲線,曲線2是在ke=48、kc=80和ku=7情況下采用模糊控制算法的系統(tǒng)響應(yīng)曲線。從系統(tǒng)控制響應(yīng)曲線2來看,由于該模糊控制器采用了純模糊控制算法和加入積分環(huán)節(jié)相結(jié)合的方案,在系統(tǒng)響應(yīng)偏離平衡點較遠時,只有模糊控制的作用,響應(yīng)速度很快,曲線斜率大;而當(dāng)響應(yīng)接近平衡點且有偏離趨勢時,由于加入積分環(huán)節(jié),曲線變化速率變慢,幾次作用后,系統(tǒng)響應(yīng)最后在平衡點附近穩(wěn)定或到達平衡點。與純PID控制器算法相比,它具有算法簡潔、響應(yīng)速度快等特點。同時要使系統(tǒng)達到快速響應(yīng)且無超調(diào),在參數(shù)選擇上是矛盾的,只憑固定的參數(shù)ke、kc和ku很難達到要求。因此,ke、kc和ku參數(shù)的選擇可以根據(jù)E和EC的變化而調(diào)整以達到提高系統(tǒng)的穩(wěn)態(tài)精度的目的,這樣整個控制系統(tǒng)既能達到控制的快速性,同時還能實現(xiàn)減少或消除系統(tǒng)穩(wěn)態(tài)誤差的效果。
模糊控制和現(xiàn)場總線是近些年控制領(lǐng)域向智能化、全面化、快速化方向發(fā)展而建立起來的兩門新技術(shù);把智能控制與現(xiàn)場總線結(jié)合起來是以后工程控制中的主要應(yīng)用方向。從整個控制系統(tǒng)的設(shè)計過程和仿真結(jié)果來看,系統(tǒng)的硬件結(jié)構(gòu)相對比較簡單,軟件實現(xiàn)方便,系統(tǒng)控制效果理想,實時性好。











評論