模糊控制在基于CAN總線的數(shù)據(jù)采集與控制系統(tǒng)中的應(yīng)用


若某時(shí)刻的偏差為 ,偏差變化率為
,偏差變化率為 ,則得到相應(yīng)的控制量為:
,則得到相應(yīng)的控制量為:

當(dāng)式(2)遍歷所有的控制規(guī)則后可得到總的模糊控制規(guī)則表,如表2所示。

系統(tǒng)輸入變量的隸屬函數(shù)采用三角形隸屬度函數(shù),模糊判決采用最大隸屬度原則,積分環(huán)節(jié)的加入與否由式(1)決定,若加入積分環(huán)節(jié)則合并該分量得到相應(yīng)的控制增量Δu。
3 模糊控制算法實(shí)現(xiàn)
3.1 硬件實(shí)現(xiàn)
考慮到大規(guī)模過(guò)程控制系統(tǒng)的分散性和信息的多樣性,采用了現(xiàn)場(chǎng)總線中的CAN總線把各個(gè)子系統(tǒng)有機(jī)地聯(lián)系起來(lái),實(shí)現(xiàn)了集中管理和對(duì)各現(xiàn)場(chǎng)設(shè)備實(shí)時(shí)?有效的控制。其硬件電路圖如圖3所示。
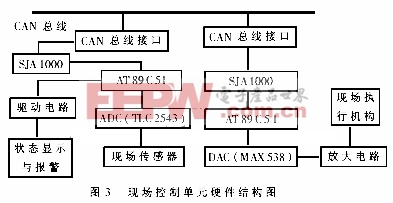
現(xiàn)場(chǎng)控制單元以AT89C51芯片為核心,主要負(fù)責(zé)對(duì)現(xiàn)場(chǎng)設(shè)備狀態(tài)的顯示與報(bào)警、對(duì)采集來(lái)的數(shù)據(jù)進(jìn)行處理和對(duì)SJA1000進(jìn)行操作、控制。其中SJA1000為CAN總線微控制器,主要把從AT89C51來(lái)的信息以CAN總線協(xié)議的格式發(fā)送到CAN總線上以供其它部分使用,并從CAN總線上接收有用信息提供給AT89C51作進(jìn)一步的處理。本系統(tǒng)的A/D和D/A轉(zhuǎn)換電路分開(kāi)設(shè)計(jì)主要是因?yàn)橐粋€(gè)大系統(tǒng)下的各個(gè)子系統(tǒng)之間是有聯(lián)系的,某一子系統(tǒng)采集到的數(shù)據(jù)可能正是另一子系統(tǒng)作進(jìn)一步處理的依據(jù),而不是自身的需要。這樣,就使各智能單元之間數(shù)據(jù)通信更為方便、快速,也便于上位機(jī)管理。該硬件電路中采用了DC-DC轉(zhuǎn)換電路和多種光電隔離器件,采用了看門(mén)狗(Watchdog)復(fù)位技術(shù),其目的主要是為了防止現(xiàn)場(chǎng)干擾信號(hào)過(guò)大而破壞核心電路以及保證系統(tǒng)在環(huán)境比較惡劣的情況下也能正常運(yùn)行。











評(píng)論