一種新型極低速異步電機(jī)無速度傳感器控制方法

由于對異步電機(jī)參數(shù)具有較好的魯棒性,本文提出的方法很好地消除了參數(shù)變化對極低速性能的影響。同時,由于無需進(jìn)行參數(shù)估計,控制算法和系統(tǒng)結(jié)構(gòu)都得到大大簡化。
4仿真結(jié)果
本文對提出的低頻信號注入法進(jìn)行了仿真,所用的電機(jī)參數(shù)如表1所示。
根據(jù)電機(jī)參數(shù),令注入的低頻d軸定子電流信號的頻率為25Hz,幅值為0.6倍額定d軸定子電流。
表1異步電機(jī)參數(shù)

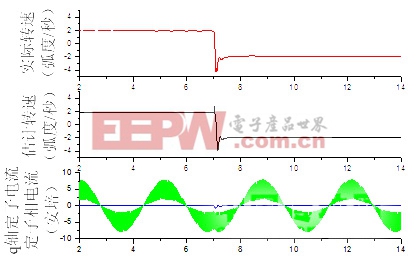
圖3空載,參考轉(zhuǎn)速突變0.3Hz->-0.3Hz
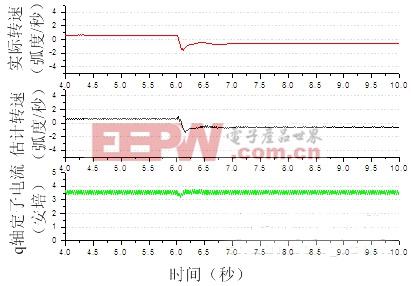
圖460%額定負(fù)載,參考轉(zhuǎn)速突變0.1Hz->-0.1Hz
圖3為異步電機(jī)0.3Hz空載運(yùn)行時突然由正轉(zhuǎn)變?yōu)榉崔D(zhuǎn)的仿真波形。
圖4為異步電機(jī)0.1Hz帶60%額定負(fù)載運(yùn)行時突然由正轉(zhuǎn)變?yōu)榉崔D(zhuǎn)的仿真波形。從圖3、圖4中可以看出,不管是否帶載,轉(zhuǎn)速突變后系統(tǒng)都能夠很快恢復(fù)穩(wěn)定,且穩(wěn)態(tài)誤差較小。
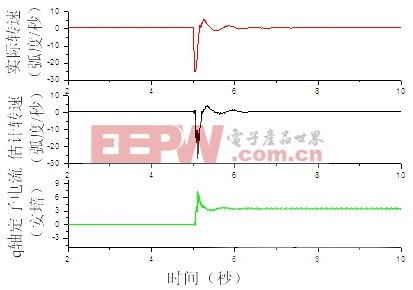
圖5參考轉(zhuǎn)速0.1Hz,負(fù)載突變0->60%Tn
圖5為異步電機(jī)0.1hz運(yùn)行時由空載突變到帶60%額定負(fù)載的仿真波形。從圖中可以看出,負(fù)載突變后系統(tǒng)能夠很快恢復(fù)穩(wěn)定,且穩(wěn)態(tài)誤差較小。












評論