基于FPGA的磁浮軸承控制系統研究

3 磁浮軸承系統仿真
一般的磁軸承系統的結構示意圖如圖1所示,由圖可見,軸向磁浮軸承主要借助軸向電磁鐵對轉子的電磁吸力來平衡轉子自身的重量,同時對轉子的軸向運動進行約束。軸向軸承主要承載的是轉子本身的自重,屬于單方向靜態載荷,而其動態載荷相對較小,故可采用單邊工作方式的圓盤電磁鐵系統。圖2為軸向磁鐵/推力盤懸浮系統轉化的簡易結構圖。圖中,x0為軸向軸承在平衡位置的間隙,i0,ic分別為電磁鐵線圈的偏置電流和控制電流,F為電磁鐵對轉子所產生的電磁力。本文引用地址:http://www.104case.com/article/163435.htm
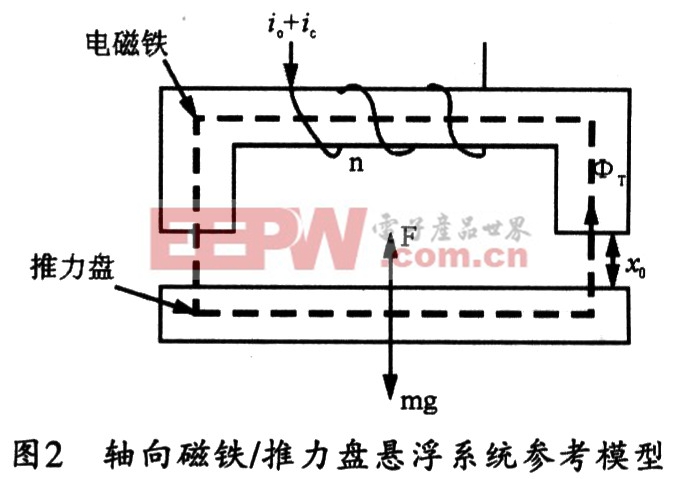
在圖2所示的簡化模型中,其磁鐵和推力盤間總的吸力為:

由于有電磁力F∝i(t)2/x(t)2,其中i(t)為激磁電流,x(t)為對應氣隙,因此,要使轉子穩定懸浮在平衡位置,必須滿足f=F-mg=0。假設輸入初始電流為i0,轉子與電磁鐵間的氣隙為x0,如將轉子作為單質點總集中質量來處理,那么,當轉子質心在Y方向上有向上的偏移量X時(轉子僅存在平移,無干擾力存在),其轉子的中心運動方程可表示為:
事實上,軸向磁鐵和徑向磁鐵具有相同的線性化數學模型,只是電流剛度和位移剛度不同,因此,軸向和徑向可采用相同的控制方法。
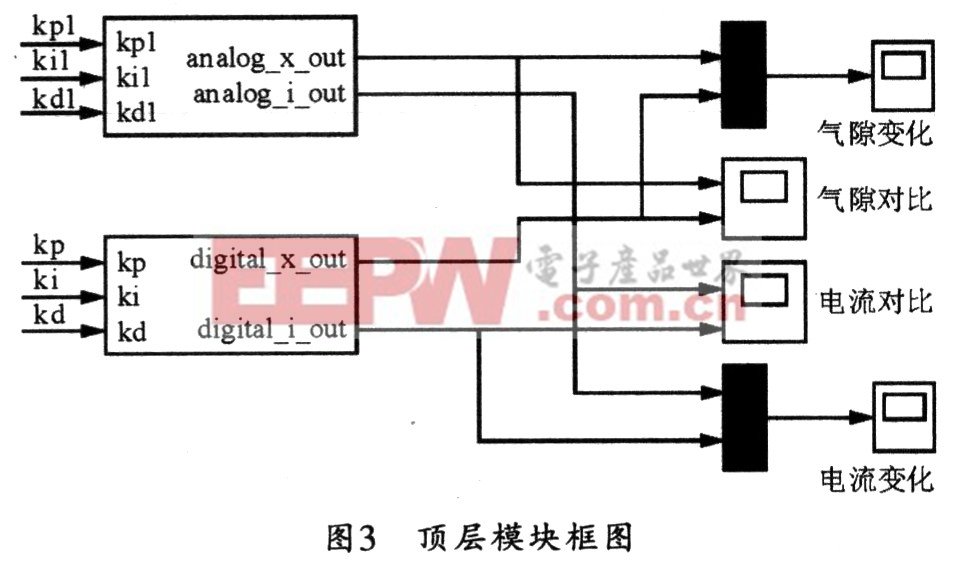
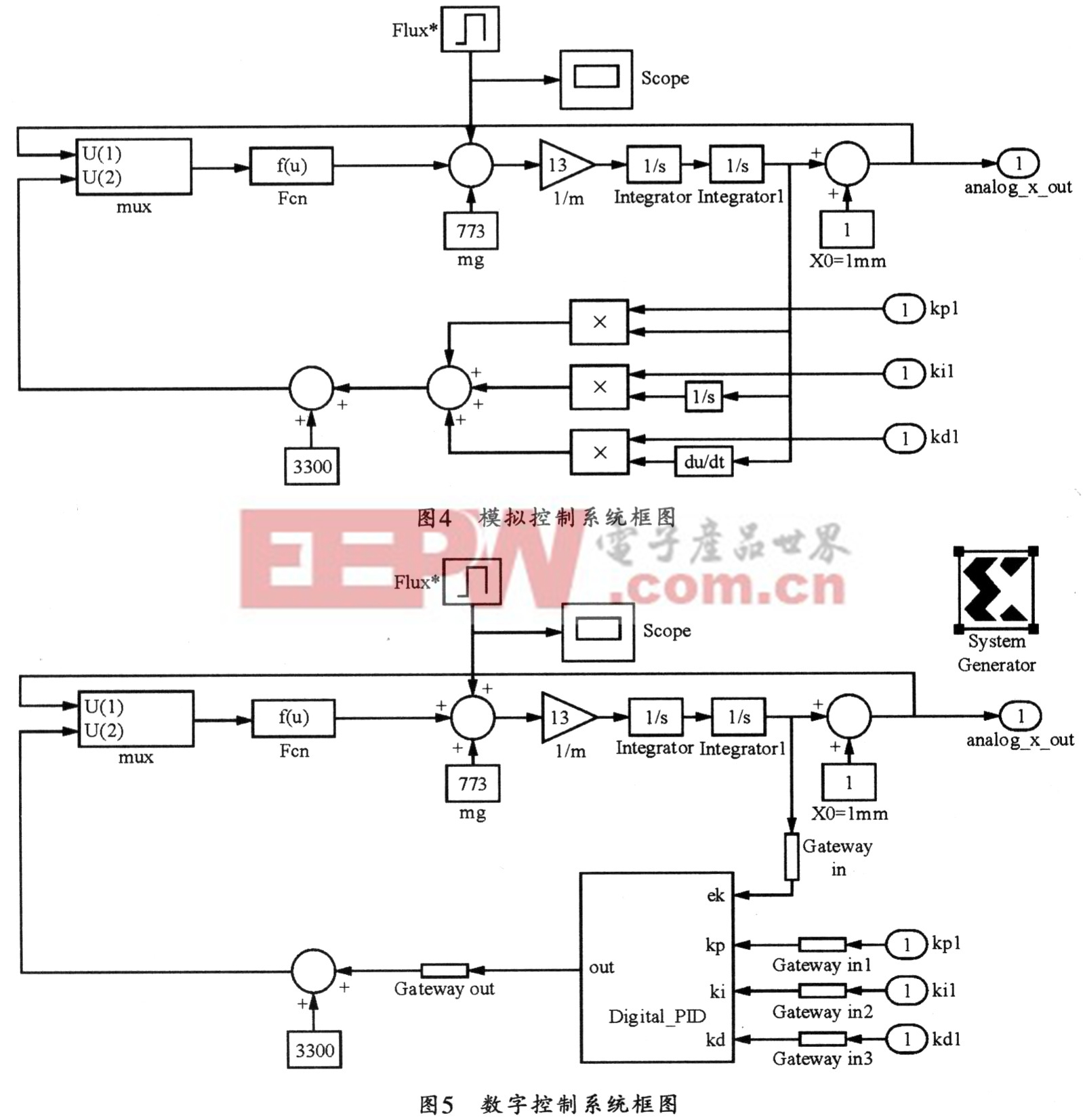
在模擬控制系統中,控制器最常用的控制是PID控制,PID控制由于其自身的優點,在工業生產過程中仍然得到了廣泛的應用。模擬PID控制器主要由三個典型的環節組成,即比例環節(P)、積分環節(I)、微分環節(D)。根據上述磁軸承系統的數學模型,可在Matlab環境下采用Simulink仿真工具對磁浮軸承軸向系統進行仿真,以觀察其輸出響應曲線。仿真數據取自實際磁浮軸承實驗裝置。由于電磁軸承本身要應用到實際生產當中去,因此,和普通的電機一樣,在工作過程中經常會遇到負載變化的情況。如風機、沖床和銑床等應用中存在軸向徑向的加載和減載等。下面以軸向軸承為例來分析加載和減載對系統的影響。為了方便進行模擬和數字的對比,首先可建立如圖3所示的頂層模塊,其中模擬控制系統仿真框圖如圖4所示,數字控制系統的仿真框圖如圖5所示。
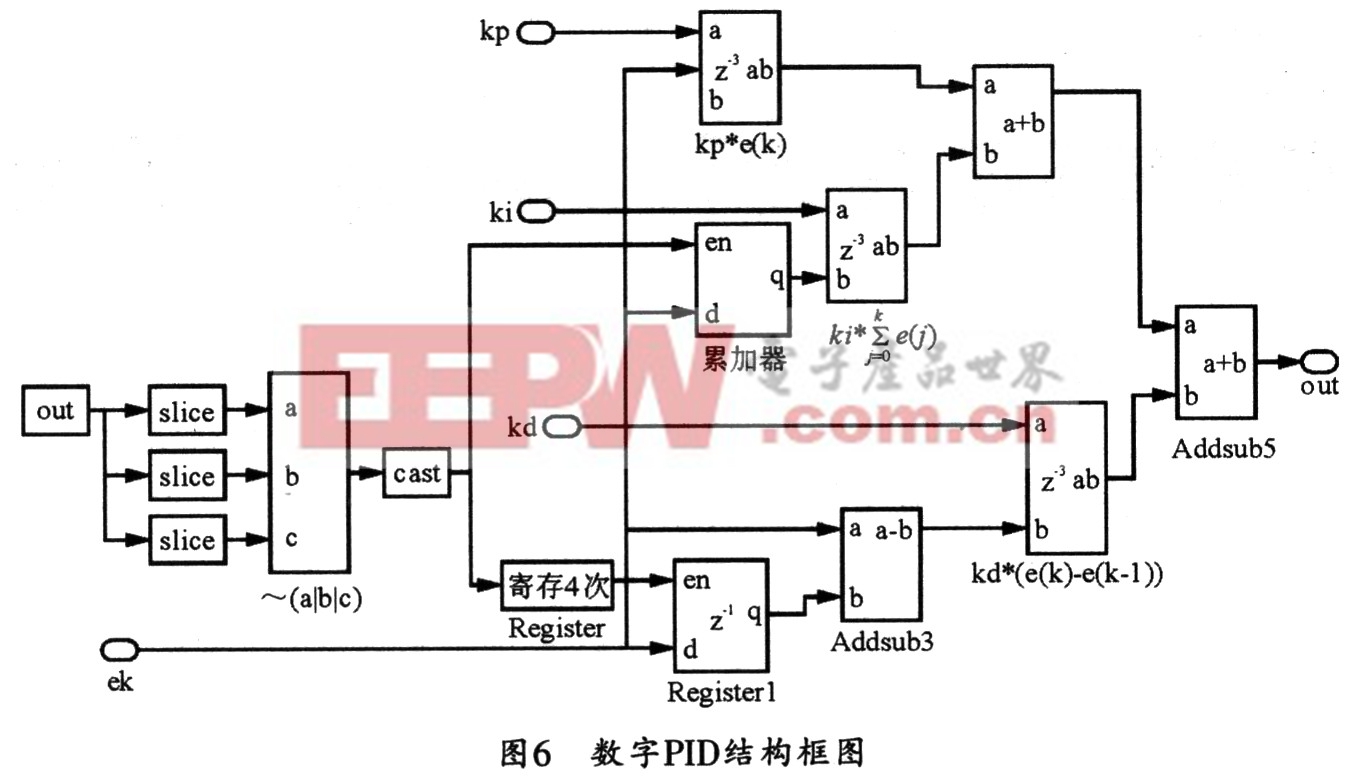
在本系統的仿真中,其數字PID使用xilinx提供的模塊集(blockset)構建而成,如圖6所示。 |
上述仿真中,偏磁電流i0為3.3 A(為仿真方便,取3.3 A并擴大1 000倍),平衡氣隙x0為1mm,磁極的截面積S為10 500 mm2,電磁線圈匝數為150匝,真空磁導率μ0為4π×10-7 Vs/Am,另外,取:mg=733 N,1/m=0.013(為仿真方便,擴大1000倍),kp=8 800,ki=18.5,kd=1 000 000,kp1=9 000,ki1=220 000,kd1=50,T=2×10-5。 相關推薦技術專區 |













評論