基于H∞混合靈敏度的導彈解耦控制器設計方法

4.3 加權函數的選擇原則
對和S(s)和T(s)進行頻域整形。在低頻段以減小靈敏度函數的增益為主,而在高頻段以減小互補靈敏度函數的增益為主。在低頻段使得S(jω)位于增益曲線VS(jω)以下,而在高頻段使得T(jω)位于VT(jω)以下。
5 仿真實例
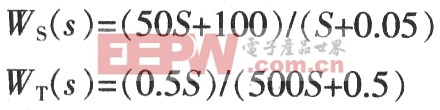
以某飛行器為例,在某一飛行條件下,兩通道的跟蹤模型為![]() 其中:
其中:
根據式(5),式(6)靈敏度函數S,補靈敏度函數T滿足的條件及其式(10)和加權函數的選擇原則,可求得靈敏度函數及補靈敏度的加權函數Ws(s),WT(s):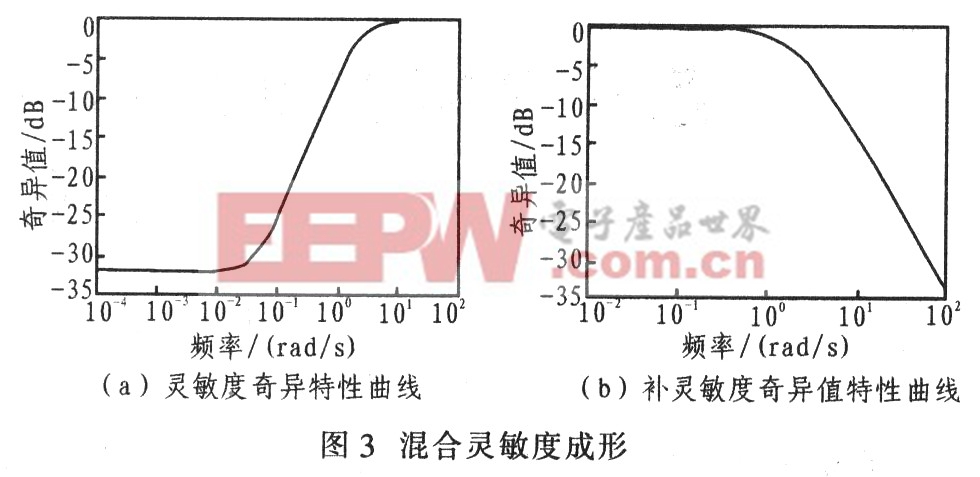
通過對其進行仿真,進行頻域整形,混合靈敏度成形如圖3所示。由圖3a和圖3b可知,通過適當選擇加權函數,對S和T進行頻域整形,靈敏度和補靈敏度奇異值曲線全頻率段內S和T的奇異值均小于其加權函數陣逆的奇異值,滿足奇異值要求,同時也滿足式(6)要求,能夠使系統具有良好的魯棒性及抗干擾能力,滿足系統的解耦條件,達到解耦目的。
6 結論
針對導彈大攻角再人過程中偏航通道和滾動通道存在較大耦合的情況,采用H∞混合靈敏度解耦控制的方法進行解耦,并對基于混合靈敏度解耦控制器的加權函數進行選擇,使加權函數能夠更好的兼顧到互補靈敏度成形和系統解耦性,從而克服系統設計中的保守性。仿真結果表明。該解耦方法可以使系統具有良好的解耦性和魯棒穩定性。








評論