基于H∞混合靈敏度的導彈解耦控制器設計方法

3 耦合彈體的數學模型
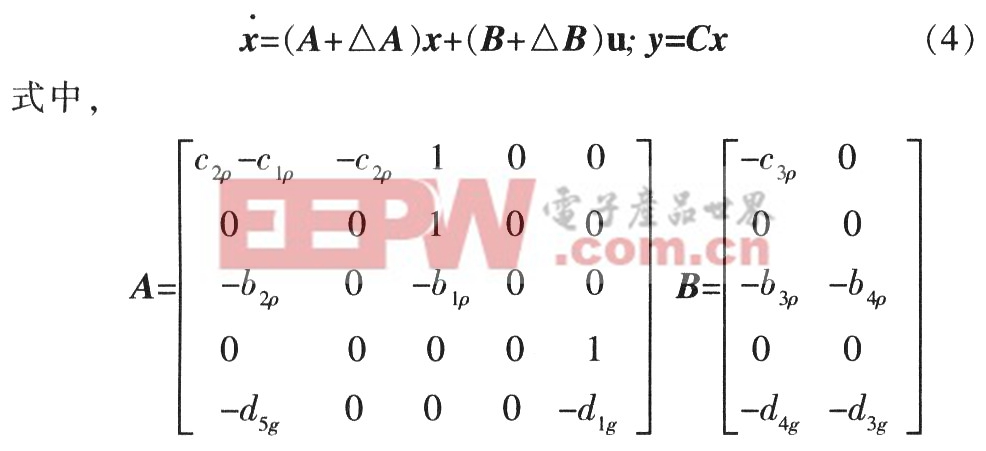
由上述3個通道的簡化模型可知,偏航通道的彈體運動方程中含有滾動通道的參量(δ,γ),滾動通道的彈體運動方程中含有偏航通道的參量(δ,ψ,β)。將相互耦合的俯仰一法向通道(1),偏航通道(2)與滾動通道(3)聯立,組成兩輸入、兩輸出的多變量系統,取狀態向量為[β ψ ψ γ γ]T,控制輸入為u=[δψc δγc]T,測量輸出為r=[ψc γc]T,得到彈體運動方程的狀態空間表示為:
 本文引用地址:http://www.104case.com/article/163432.htm
本文引用地址:http://www.104case.com/article/163432.htm △A,△B為高頻彈性振動等引起的參數不確定性部分, 2,3,4)為系數。
2,3,4)為系數。

由式(5)可知,S(s)+T(s)=I,I為單位陣。選擇適當的加權函數,對S(s)和T(s)進行頻域整形,即在低頻段以減小靈敏度函數的增益為主,而在高頻段以減小互補靈敏度函數增益為主,使系統頻域整形后滿足:

式中,Ws(s)為反映系統抗干擾的性能加權,WT(s)為反映系統魯棒性加權。
4.2 解耦控制器設計問題
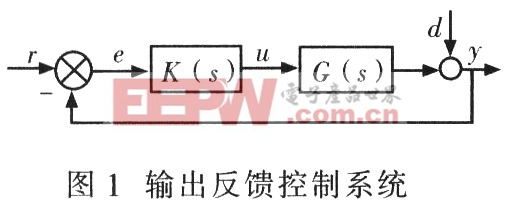
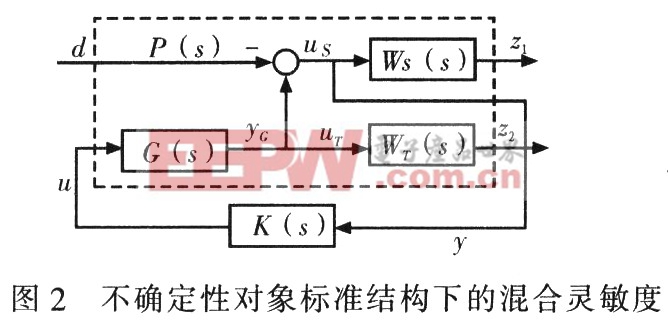
由式(5)可知,T(s)為圖1所示系統的閉環傳遞函數。為此可以將T(s)成形為理想的對角矩陣來達到解耦的目的。文獻[4]給出將H∞混合靈敏度成形為標準的H∞問題,本文是在此基礎上加以推導,并選擇適當加權函數,達到解耦的目的。圖2為H∞混合靈敏度框圖。圖2中,z1,z2為性能評價輸出。uS,uT分別為Ws(s)和WT(s)的輸入,yG為G(s)的輸出。
則G0(s),WS(s),WT(s)的狀態空間實現分別為:

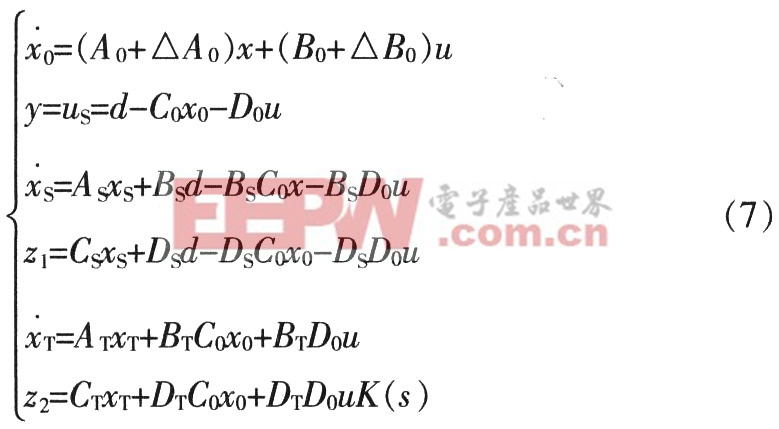
由圖2可知,系統P(s)的輸入為d,u,輸出為z1,z2,y。設x0,xS,xT為G(s),WT(s),WS(s)的輸出狀態。由圖2可以推導:yG=C0x0+D0uyuT=yg,us=d-yG,則:








評論