基于FPGA的溫度模糊自適應(yīng)PID控制器的設(shè)計

溫度是工業(yè)生產(chǎn)過程中一個主要的被控參數(shù)。目前,大多采用常規(guī)PID控制器實現(xiàn)對溫度的控制。PID控制器具有結(jié)構(gòu)簡單、易于實現(xiàn)且魯棒性好、可靠性高等優(yōu)點,對可建立精確數(shù)學(xué)模型的定常系統(tǒng)具有很好的控制效果,但由于實際溫度控制系統(tǒng)工況復(fù)雜、參數(shù)多變、大慣性、大滯后,常規(guī)PID控制器難以對其高精度進行控制。模糊控制魯棒性強,無需被控對象的精確數(shù)學(xué)模型,只依賴于操作人員的經(jīng)驗知識及操作數(shù)據(jù),非常適用于控制非線性、時變和滯后系統(tǒng),但其靜態(tài)性能較差,因此應(yīng)用范圍受很大限制。針對這些問題,這里提出一種基于FPGA的溫度模糊自適應(yīng)PID控制器設(shè)計方案,該方案將傳統(tǒng)PID控制與現(xiàn)代模糊控制相結(jié)合,應(yīng)用模糊推理方法實現(xiàn)對PID參數(shù)的自動整定。由此,經(jīng)MATLAB仿真驗證該控制算法的可行性,將其應(yīng)用于恒溫箱的溫度控制。該控制器對恒溫箱控制系統(tǒng)的控制效果明顯優(yōu)于常規(guī)PID控制器。
2 模糊自適應(yīng)PID控制原理及結(jié)構(gòu)
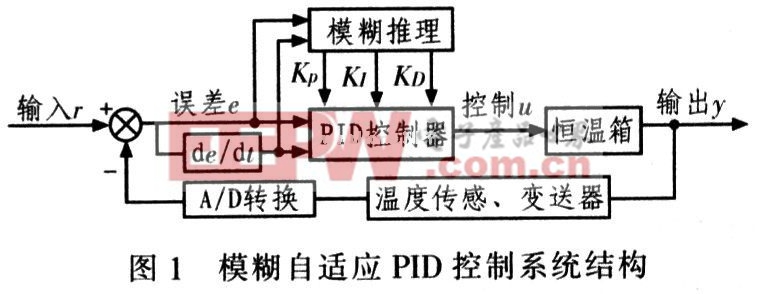
模糊自適應(yīng)PID控制基本原理:以誤差e和誤差變化ec作為輸入,運行中不斷檢測e和ec,并利用模糊規(guī)則進行模糊推理,查詢模糊矩陣表調(diào)整參數(shù),滿足不同時刻的e和ec對PID參數(shù)自整定的要求,利用模糊規(guī)則在線修改PID參數(shù),以使被控對象具有良好的靜態(tài)、動態(tài)性能。模糊自適應(yīng)PID控制系統(tǒng)結(jié)構(gòu)如圖1所示。
常規(guī)PID控制器作為一種線性控制器,其離散的控制規(guī)律為:

對于系統(tǒng)被控過程中不同的|e|和|ec|,PID參數(shù)Kp、KI、KD的自整定原則如下:
(1)誤差|e|較大時,為加快系統(tǒng)的響應(yīng)速度,使系統(tǒng)具有快速跟蹤性能,應(yīng)取較大Kp和較小KD。同時,為了防止積分飽和。避免系統(tǒng)超調(diào)過大,應(yīng)限制KI或使其為零。
(2)誤差|e|和|ec|中等時,為使系統(tǒng)超調(diào)較小,應(yīng)取較小KP,適當KI和KD,特別是KD的取值對系統(tǒng)響應(yīng)影響較大(一般取值較小)。
(3)誤差|e|較小時,為使系統(tǒng)具有較好穩(wěn)態(tài)性能,應(yīng)取較大KP和KI。同時,為避免系統(tǒng)在平衡點附近出現(xiàn)振蕩,應(yīng)取合適的KD值。|ec|較大時,取較小KD;|ec|較小時,取較大KD。
考慮到上述原則,在該設(shè)計中,模糊控制器采用2輸入,3輸出的結(jié)構(gòu)。以誤差e和誤差變化ec作為輸入,經(jīng)量化和模糊化處理后,查詢模糊控制規(guī)則表,得到模糊輸出量KP、KI、KD,再經(jīng)解模糊和量化因子輸出精確量,并將該輸出量與傳統(tǒng)PID相結(jié)合輸出系統(tǒng)的控制量。輸人語言變量e和ec以及輸出語言變量KP、KI、KD的模糊集論域均設(shè)為{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},取相應(yīng)論域上的語言值為{NB,NM,NS,ZO,PS,PM,PB}。考慮到對論域的覆蓋程度及靈敏度,魯棒性和穩(wěn)定性等原則,各模糊子集隸屬度函數(shù)均采用三角形隸屬函數(shù)。
模糊規(guī)則采用“if e is A and ec is B then KP is C and KI isD and KD is E”的方式,控制器參數(shù)模糊推理過程采取Mam-dani直接推理法,“與”運算采用極小運算,“或”運算采用極大運算,模糊蘊含運算采用極小運算,模糊規(guī)則綜合采用極大運算,去模糊化采用重心法且其計算公式為:

根據(jù)PID參數(shù)調(diào)整原則,輸出量KP、KI、KD一輪決策將最多涉及147條推理規(guī)則。
3 恒溫箱溫度控制系統(tǒng)硬件電路設(shè)計
溫度控制目前大多采用以單片機或CPU為核心的控制系統(tǒng),這些以軟件控制和運算的系統(tǒng)相比于硬件系統(tǒng)速度要慢、實時性差且可靠性低。
FPGA作為一種新型的數(shù)字邏輯器件,具有集成度高、可重復(fù)編程、邏輯實現(xiàn)能力強、設(shè)計靈活等特點,使用其內(nèi)部邏輯模塊單元實現(xiàn)所需功能,各個模塊并行運行,這使得系統(tǒng)運算速度快、實時性強。與傳統(tǒng)的基于CPU并行計算不同,FPGA內(nèi)部結(jié)構(gòu)真正實現(xiàn)并行計算,不是宏觀上并行而是微觀上分時運算。
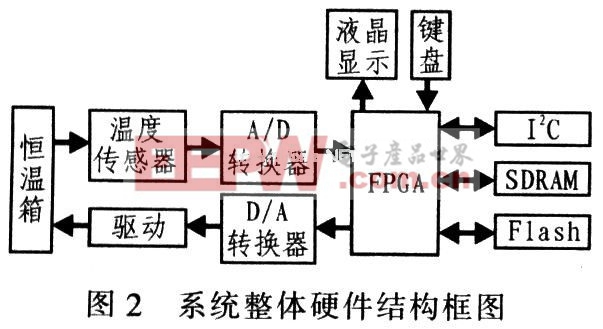
該設(shè)計采用Ahera公司的Cyclone系列FPGA器件EP1C12為核心控制器來測量與控制恒溫箱內(nèi)溫度。通過鍵盤向FPGA輸入設(shè)定溫度,現(xiàn)場溫度參數(shù)由熱電偶傳感器轉(zhuǎn)換成電動勢信號,經(jīng)A/D轉(zhuǎn)換和濾波后,將實時的數(shù)字測量值送入FPGA。FPGA將比較溫度的設(shè)定值與測量值,經(jīng)模糊自適應(yīng)PID控制算法運算處理后,輸出相應(yīng)控制信號,確保恒溫箱內(nèi)溫度變化范圍始終保持在設(shè)定值的誤差范圍內(nèi)。系統(tǒng)的液晶顯示用于實時顯示控制系統(tǒng)的當前溫度值、溫度變化曲線、參數(shù)配制等信息;鍵盤用于設(shè)定控制系統(tǒng)的初始定值及初始參數(shù)信息;Flash,SDRAM,I2C等用于實現(xiàn)存儲空間的擴展。圖2為系統(tǒng)整體硬件結(jié)構(gòu)框圖。
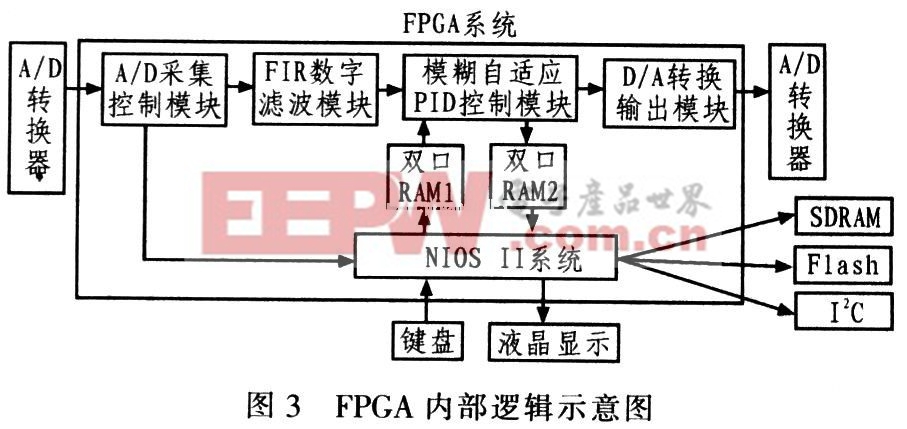
此外,在FPGA中還集成有Altera公司提供的NIOS II軟核處理器,F(xiàn)PGA一方面通過內(nèi)部的雙口RAM與其內(nèi)部的硬件邏輯控制模塊進行通訊,獲取控制模塊的狀態(tài)信息并配置其參數(shù);另一方面監(jiān)控顯示模塊和鍵盤模塊。FPGA內(nèi)部邏輯示意圖如圖3所示。

pid控制器相關(guān)文章:pid控制器原理











評論