基于PLD的CCD Sensor驅動邏輯設計

2.1 水平同步信號HD和垂直同步信號VD
由ICX285AL原理可知,基本時鐘CLK循環周期應當設為1 790。水平驅動信號H1,H2和垂直驅動信號V1,V2A,V2B,V3,V4,以及轉移信號SUB在此基礎上建立相互的時序關系。H1與H2相位相差180°,V2A與V2B相位完全相同。
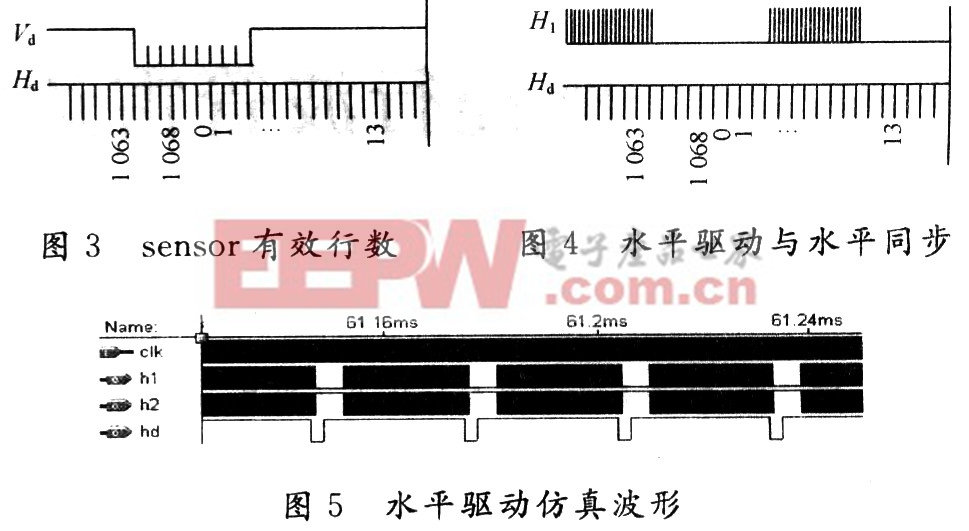
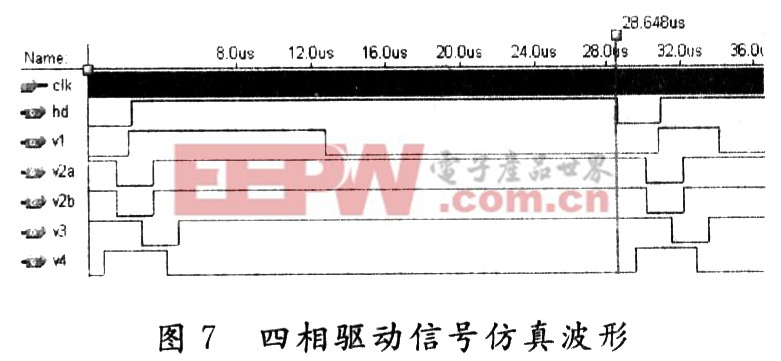
設置水平同步信號HD和垂直同步信號VD的關系,可定位sensor有效行的起始位置以及用于校正目的的暗像素(dark pixel)位置。如圖3所示,通過sensor采集的圖像有效行數為1 063-3=1 060。圖4表明水平驅動信號H1與水平同步信號HD的時序關系。水平驅動信號H1、H2,水平同步信號HD與基本時鐘信號clk之間的時序關系如圖5所示,完全滿足HD的相位要求。本文引用地址:http://www.104case.com/article/163379.htm
2.2 刷新信號SUB
刷新信號SUB表示Sensor每傳輸一行圖像信號,就會有一個刷新脈沖產生。參照ICX285AL原理,系統的基本計數器Counter計數范圍從1~161之間的值時,SUB為“0”,低電平;Counter計數范圍從161~287之間的值時,SUB為“1”,高電平;當為其他值時,SUB為“0”。圖6為刷新信號SUB與垂直驅動信號時序關系的仿真結果。

2.3 四相位驅動脈沖
根據四相CCD電荷轉移的原理,CCD中的電荷根據四相時鐘信號驅動,實現電荷轉移。設計過程中必須保證四相驅動信號V1,V2,V3,V4的時序關系。圖7所示為四相驅動信號與水平同步信號的仿真波形。

3 驅動電路CPLD實現
采用Altera公司的CPLD芯片EPM3256AQC208完成CCD驅動電路,方案已應用于工業攝像頭系統。利用泰克500 MHz示波器實測波形如圖8所示,圖9為水平驅動和垂直驅動信號局部放大波形。時序及時延參數均滿足要求,工作穩定可靠。基于PLD技術的方案,易于實現與其他芯片的接口,具有高度靈活性、天然的并行性和快速成型等特點,同時可通過編譯平臺方便設置PLD芯片的驅動電流,有效降低系統噪聲,是一種性價比較高的選擇。






評論