基于臺(tái)達(dá)20PM的點(diǎn)膠機(jī)數(shù)控系統(tǒng)

首先向D1868中賦值H8003選中運(yùn)動(dòng)子程序0X3,然后啟動(dòng)運(yùn)動(dòng)子程序。觸發(fā)條件可以用外部開關(guān)信號(hào)觸發(fā),如圖6所示。

圖6 運(yùn)動(dòng)控制系統(tǒng)啟動(dòng)
4.5 運(yùn)動(dòng)子程序編寫
編程樹形圖如下所示:

子程序主要完成G碼運(yùn)動(dòng)控制。要靈活運(yùn)用Z0變址寄存器來實(shí)現(xiàn),我們把運(yùn)動(dòng)數(shù)據(jù)放在D2000開始的寄存器里如圖7所示。
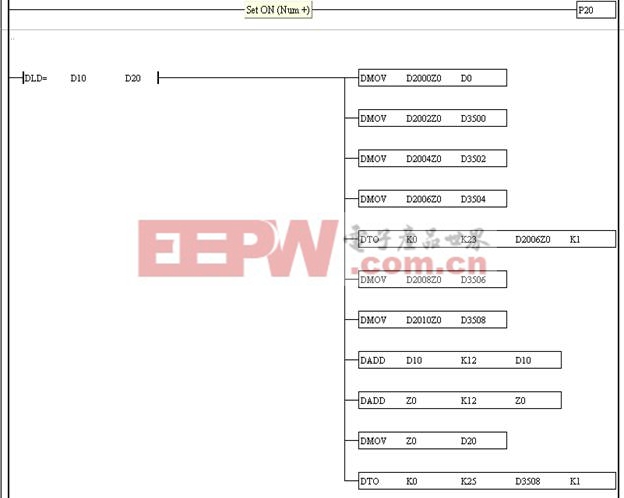
圖7 G碼運(yùn)動(dòng)數(shù)據(jù)
我們這里用到的G碼有G01直線運(yùn)動(dòng)、G02順時(shí)針圓弧插補(bǔ)運(yùn)動(dòng)控制、G03逆時(shí)針圓弧插補(bǔ)運(yùn)動(dòng)控制。可以看到我們需要G碼選擇2個(gè)字、X坐標(biāo)2個(gè)字、Y軸坐標(biāo)2個(gè)字、半徑2個(gè)字、速度2個(gè)字,備用2個(gè)字。相當(dāng)于1條運(yùn)動(dòng)指令我們需要12個(gè)字。所以我們只需要執(zhí)行一條運(yùn)動(dòng)指令后Z0加12,在把新的數(shù)據(jù)賦值到D3500-D3508里面就可以了。讓程序在子程序里循環(huán)檢測(cè),檢測(cè)到D2000Z0為1的時(shí)候調(diào)用G01、為2時(shí)調(diào)用G02、3時(shí)調(diào)用G03、4時(shí)用FROM/TO指令完成對(duì)01PU的運(yùn)動(dòng)控制,直到檢測(cè)到G碼D2000Z0為0跳出子程序,如圖8所示。



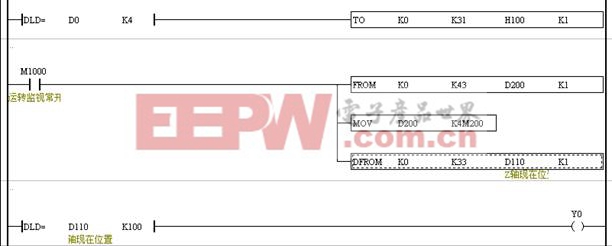
圖8碼運(yùn)動(dòng)控制
4.6 人機(jī)界面HMI程序
主要包括對(duì)D2000以后的寄存器賦值和顯示的功能,這里可以用配方配合。還有在HMI上點(diǎn)動(dòng)設(shè)置好X/Y/Z的坐標(biāo)下載到D2000以后的寄存器里。可以在根據(jù)需要在做個(gè)當(dāng)Z軸到指定坐標(biāo)后Y0輸出,讓膠水動(dòng)作。
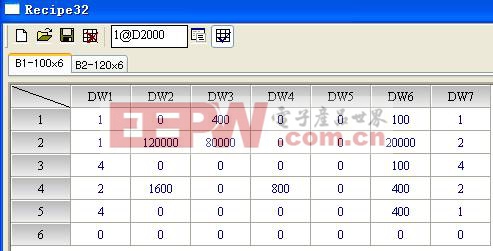
用臺(tái)達(dá)Screen Editor 2.00.05里選擇-工具-32配方-新建1個(gè)100×6的配方,在上面的地址欄填數(shù)據(jù)的起始地址1@ D2000,然后里面填好需要的數(shù)據(jù)。做個(gè)新界面做一些數(shù)據(jù)顯示的框地址從RCP0開始對(duì)應(yīng)D2000,用RCPNO和RCPG選擇組數(shù)和配方數(shù)。用控制區(qū)第5個(gè)字的第2位和第3位控制配方的上傳、下載,如圖下所示:
5 結(jié)束語
使用20PM能很好的實(shí)現(xiàn)點(diǎn)膠機(jī)的功能。編輯和踩點(diǎn)式錄入軌跡參數(shù)、速度可以自由設(shè)定,界面操作簡(jiǎn)單方便。經(jīng)過測(cè)試我們畫出的圓達(dá)到半徑1.5毫米不會(huì)走形,完全滿足用戶要求。整個(gè)設(shè)備的精度還和機(jī)械設(shè)備有關(guān)系,比如:如果用伺服電機(jī)代替步進(jìn)電機(jī)、絲桿代替皮帶的話,可能在高速點(diǎn)膠過程中精度更穩(wěn)定。實(shí)踐證明20PM在運(yùn)動(dòng)控制中穩(wěn)定可靠,本案例可以應(yīng)用到相關(guān)機(jī)械設(shè)備。

手機(jī)電池相關(guān)文章:手機(jī)電池修復(fù)
燃?xì)鈭?bào)警器相關(guān)文章:燃?xì)鈭?bào)警器原理





評(píng)論