基于TMC428的步進電機控制系統設計

控制系統的軟件主要完成對TMC428的初始化以及控制參數計算和發送的工作。在初始化過程中首先要對TMC428的工作模式進行設置,一個是位置控制模式和速度控制模式,另外就是TMC428所要控制的步進電機的個數。這些參數的設置是通過微處理器向TMC428的相關寄存器寫數據來完成。其中位置和速度控制模式寄存器的地址為1010,在本系統中位置控制采用RAMP模式,速度控制采用VELOCITY模式。由于本系統是三軸控制設計,所以TMC428要同時對三個步進電機進行控制,因此在步進電機全局配置參數寄存器設置中要把寄存器的地兩位設置為10,其他位采用默認值。根據TMC428的功能要求,每個電機都有自己的配置寄存器,對于電機的初始位置和初始速度都要在各自寄存器中單獨設置。在初始化過程中對電機的目標速度、目標位置、實際速度和位置以及加速度和速度的最大值、最小值進行設置00地址表示電機1,01地址表示電機2,10地址表示電機三,其寄存器地址范圍為0000~1110。當初始化完成后根據實際需要微處理器在任意時刻都可以改變寄存器和片內RAM中的數據以適應實際控制。本系統的軟件工作過程如圖四所以。
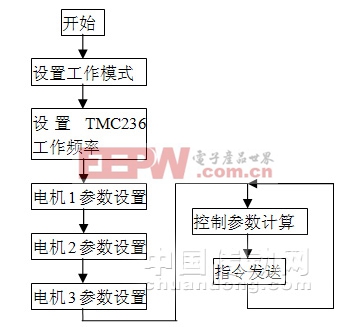
圖四
五、總結
采用專用步進電機運動控制器和驅動電路組成的系統具有外圍電路簡單、系統抗干擾能力強和可靠性高等優點,可減少控制電路的開發成本。整個系統除了電源之外只有5個IC,因此,體積小,控制簡單,特別適用于3軸步時電機的驅動。實驗證明該驅動器控制的步時電機定位精度高,加、減速性能良好,同時,啟停、反轉性能也很優良。
參考文獻:
1TMC428datasheet
2TMC236datasheet
3吳紅星.《電機驅動與控制專用集成電路及應用》.北京:中國電力出版社,2006年
4于海生、潘松峰、于培仁、吳賀榮.《微型計算機控制技術》.北京:清華大學出版社,1999年
5董桂花.《步進電機控制系統的研究》.《農機化研究》.2003年03期。
6周明德.《單片機原理與技術》.北京:人民郵電出版社,2008年










評論