基于Matlab的CDMA系統(tǒng)功率控制算法研究

式中:ωn=ωmcos(2πn/N),n=1,2,…,N0;φN是最大多普勒頻率正弦曲線的初始相位,φn=第n個(gè)多普勒頻移正弦曲線的初始相位。移動臺的速率為50 km/h(13.9 m/s),多普勒頻移fm=41.6 Hz。N0=8,φN=0。采用Matlab進(jìn)行仿真,如圖5所示。
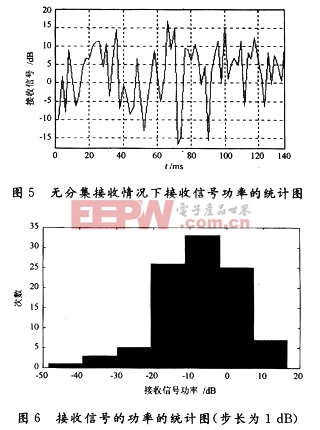
從圖5可看出,固定步長功率控制算法在無分集接收情況下,接收信號有很強(qiáng)的“過沖”現(xiàn)象,這是由于系統(tǒng)根據(jù)上一時(shí)刻的接收信號的功率的強(qiáng)度來決定下一時(shí)刻的功率調(diào)整方向,而且每次的功率控制在系統(tǒng)出現(xiàn)深度衰落的時(shí)刻,就會無法即時(shí)補(bǔ)償,而在控制誤差很小時(shí),將引起很大的波動。接收信號的功率的統(tǒng)計(jì)圖如圖6所示。
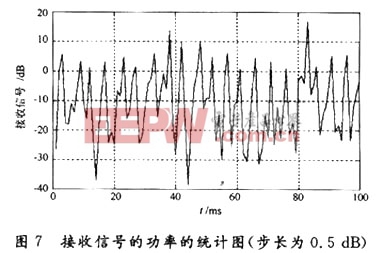
從圖6可以看出,實(shí)際接收的信號在期望值的附近波動,而且分布的兩邊是非對稱。比較步長為1 dB的圖6和步長為0.5 dB的圖7,可發(fā)現(xiàn)在相同的衰落情況下,步長為1 dB的算法比較適合。從這里也可看出步長的取定與具體環(huán)境(如衰落程度和背景干擾)有關(guān),這也是固定步長功率控制的弊端所在。
3結(jié)語
這種功率控制算法,允許基站發(fā)送功率控制命令,用戶通過控制命令,以固定的步長調(diào)整發(fā)射功率,功率改變的過程就像一個(gè)“乒乓”控制,這種控制方法的系統(tǒng)穩(wěn)定性差,且有很大的過調(diào)量和穩(wěn)定時(shí)間。單純從功率控制的角度,提高控制精度的方法有兩種。一是提高功率測量速度,相應(yīng)地提高功率控制的頻度,從而增大相鄰的兩個(gè)樣點(diǎn)的相關(guān)程度以達(dá)到提高控制精度的目的;另一種方法是提高控制量的精調(diào)程度,每次控制命令用多個(gè)比特來表示,從而提高控制精度。

cdma相關(guān)文章:cdma原理







評論