飛思卡爾智能車舵機和測速的控制設計與實現

在實際調試車模時發現,這種方法對提高舵機的響應速度也具有局限性:當在舵機輸出力矩相同的條件下,力臂越長,作用力越小。在轉向遇到較大轉向阻力時,會影響舵機對轉向輪控制的精度,甚至使轉向輪的響應速度變慢;另外,舵機機械結構精度產生的空程差也會在力臂加長中放大。使得這一非線性環節對控制系統的不利影響增大。因此,舵機安裝的高度具有最佳范圍,仍需通過試驗反復測試。本文引用地址:http://www.104case.com/article/163145.htm
3 霍爾傳感器的應用
由于在賽前比賽賽道的幾何圖形是未公開的。賽前車模訓練的路線與實際比賽的路線相差甚遠,若車模自適應性調整不好,車模會在連續彎道處頻繁的偏轉。賽道的變更給車模的適應性和穩定性帶來了一定挑戰。為了使得車模能夠平穩地沿著賽道行駛,除控制前輪轉向舵機以外,還需要控制好各種路況的車速,使得車模在急轉彎和下坡時不會因速度過快而沖出賽道。因此,利用霍爾傳感器檢測車模瞬時速度,實現對車模速度的閉環反饋控制,小車的PC9S12控制板能夠根據賽道路況變化而相應執行軟件給定的加速、減速、剎車等指令,在最短的時間內由當前速度轉變為期望的速度,使得車模快速平穩行駛。
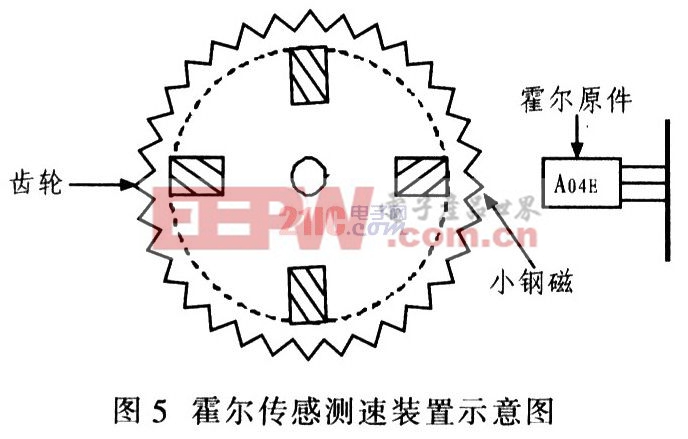
基于霍爾效應,固定在轉盤附近的霍爾傳感器便可在每個小鋼磁通過時產生一個相應的脈沖,檢測出單位時間的脈沖數,便可知被測轉速。霍爾傳感測速裝置示意圖如圖5所示。顯然不是安裝小鋼磁越多越好,在一定的條件允許范圍內,磁性轉盤上小鋼磁的數目越多,確定傳感器測量轉速的分辨率也越高,速度控制也越精確。一般4~8片是最佳范圍。
4 結束語
為了參加第四屆“飛思卡爾”杯全國大學生智能汽車競賽,此設計方案在校級代表隊資格選拔賽中表現完美,最終跑出 19.7 s的好成績,成功入選。實踐證明了智能車舵機控制轉向和霍爾控制測速優化方案具有可行性和實用性。

霍爾傳感器相關文章:霍爾傳感器工作原理
霍爾傳感器相關文章:霍爾傳感器原理






評論