飛思卡爾智能車舵機和測速的控制設計與實現

摘要:“飛思卡爾”杯全國大學生智能汽車競賽要求車模行駛“穩”、“準”、“快”。通過優化智能車系統中舵機安裝,利用霍爾傳感器控制測速,車模在不同賽道都能夠適應新賽道,確保了智能車行駛的快速性和可靠性。該車模設計方案方法簡單,效果明顯、進行穩定。實踐證明該方案時提高車模自適應性具有可行性。
關鍵詞:飛思卡爾;智能車;舵機;霍爾傳感器;優化
“飛思卡爾”杯全國大學生智能汽車競賽以快速跑完規定賽道為目標。盡可能提高車模速度,跑出好成績,是整個車模設計的關鍵。為了進一步提高車模速度,作者曾在車模調試階段嘗試算法、程序控制等多種方法都無明顯效果,經多次分析發現,舵機的優化及其控制尤為重要,特別合適舵機轉向和速度檢測反饋控制。經過不斷改進、調試和優化,該設計方案能夠使智能車行駛速度和穩定性都得到顯著提高。
1 車模系統
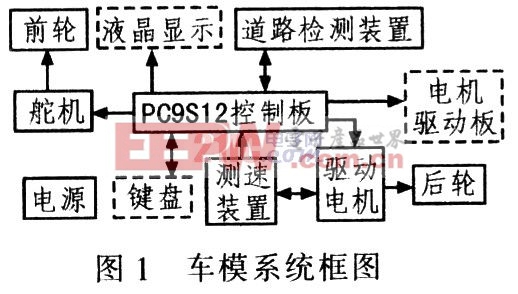
飛思卡爾智能車系統主要由一系列的機械零部件和控制軟件組成,主要包括由大賽組委會統一提供標準的車模底盤、輪胎、舵機、驅動電機、PC9S12控制板和電源等,另外,系統中的道路檢測裝置和測速裝置需自行設計安裝。圖l為車模系統框圖。
要賽出好的成績,智能車除應具有可靠的道路檢測裝置外,舵機的靈活轉向控制則依賴于機械系統中各個零部件間協調運行。為提高智能車的整體協調性能,一定要把握好“車身簡捷、底盤低穩、轉向靈活、協調匹配”的設計與安裝原則。
2 舵機
舵機是操控車模行駛的方向盤。舵機的輸出轉角通過連桿傳動控制前輪轉向,其轉角精度直接影響到智能車模能否準確按賽道路線行駛,此外,還可考慮采用舵機進行機械閘制動以及多個舵機群控等方法。但飛思卡爾智能汽車大賽規則要求車模中的舵機不能超過3個。

霍爾傳感器相關文章:霍爾傳感器工作原理
霍爾傳感器相關文章:霍爾傳感器原理






評論