一種基于FPGA的雷達波束控制系統設計

驅動板的單片機串口接收來外來的控制指令,判斷波束控制系統是處在哪種工作狀態。如果是聯機工作,則SCU接收聯機自檢指令,讀入組件地址、開關狀態、發射和接收移相碼、衰減控制碼,并將這些控制碼存在指定的寄存器內,等待通道狀態讀取指令到達后,將它們回送到運算板,在所設計的控制界面內可以顯示,從而得知波束控制系統整個子系統的運行工作情況。如果是模擬子系統控制指令,打開與EPLD之間的通信控制開關,將來自串口的控制指令,經處理發給EPLD。
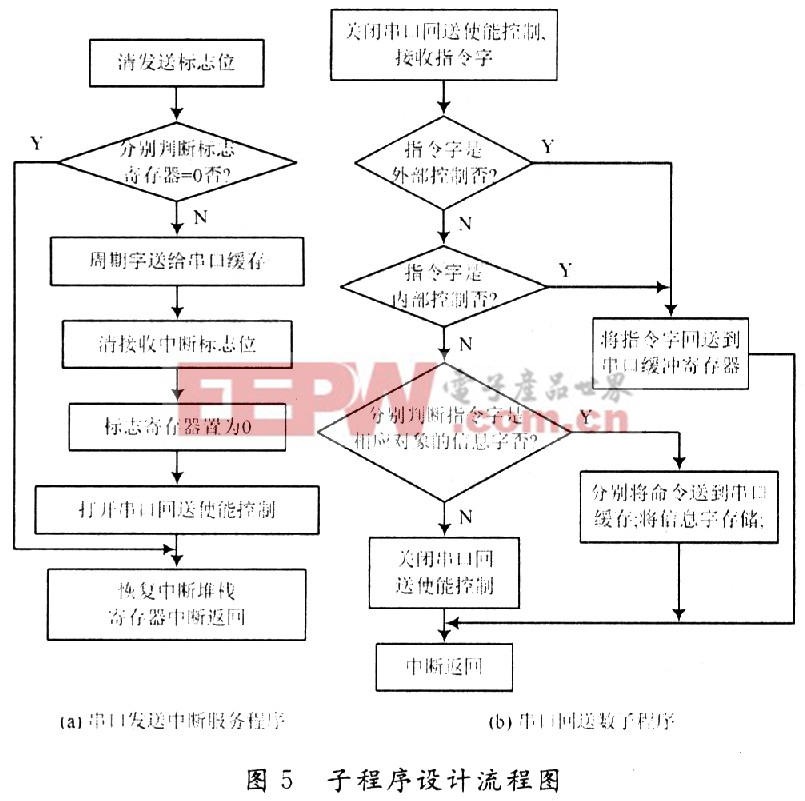
EPLD也要判斷收到的指令來自單片機還是雷達系統,如果是單片機,則接收來自調試計算機的指令;否則,直接接收來自雷達系統的控制指令。單片機的程序設計主要分為四部分:程序初始化、串口接收中斷服務子程序、串口發送中斷子程序和串口回送數據子程序。后兩者子程序設計流程示意如圖5所示。其中,指令字包含的信息分別為開關狀態碼、陣面回數信息、陣面回數狀態、陣面自檢信息、移相值和衰減值。本文引用地址:http://www.104case.com/article/163038.htm
這里仍然選用VB編寫調試控制程序,用來模擬產生來自運算板的控制信號,實現對驅動板的調試控制。編寫的調試控制程序分為五個模塊:控制方式選擇、移相角度選擇、衰減值選擇、定時信息選擇、控制碼發送和發送數據校對信息顯示。
4 結論
該FPGA程序設計既可滿足天線對波束控制0.5 ms內完成運算和傳輸數據的時間要求,又滿足波束控制分系統在線自檢;根據工作頻率,進行初相位在線補償;天線相位碼隨機饋相的功能需求。其調試控制程序,不僅滿足單板調試、補償文件寫入或者讀出操作的需要,還用于雷達天線暗室測試的控制。同樣,單片機和EPLD的程序設計,滿足天線組件對波束控制系統裝機和測試用同一個程序的要求。調試過程中,兩者都有友好的控制界面可操作。












評論