自循跡移動靶車控制系統設計

本文研究一種能夠對路徑進行自主識別的自循跡移動靶車控制系統,該系統采用普通的膠條或油漆制成的色帶作為引導線,通過攝像頭傳感器動態提取引導線的位置來判別靶車的運行姿態,進而控制靶車的移動方向,實現對路徑自主識別的功能。
1 系統工作原理
在實際應用中,靶車帶有較厚的防護鋼板和防跳彈橡膠,移動和停位時慣性較大難以控制,況且射擊訓練中對靶車的移動速度和彎道曲率要求不高,所以自循跡移動靶車采用三輪結構的驅動方式。前面兩輪作為獨立的主驅動輪,后輪為萬向輪。前面兩輪除負責前進、后退外,當轉速不同時能夠實現靶車的曲線行走和原地旋轉。

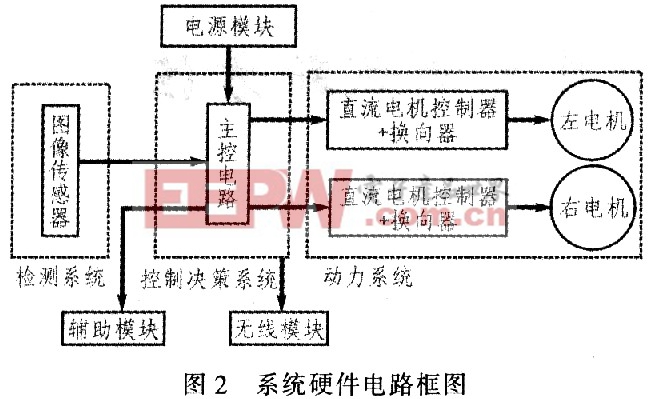
整個控制系統可分為檢測系統、控制決策系統和動力系統3部分。檢測系統相當于靶車的“眼睛”,采集靶車移動的路徑信息;控制決策系統相當于靶車的“大腦”,保證系統穩定、協調、有序的工作;動力系統用于完成靶車的各種運動姿態。系統的工作信息流程如圖1所示,檢測系統實時采集靶車移動的路徑信息,經控制決策系統分析、處理后控制動力系統做出相應的調整,實現對靶車位置的精確定位和動作控制。
2 系統硬件電路和軟件設計
2.1 硬件電路
系統硬件平臺主要由圖像采集模塊、主機控制電路和電機驅動電路組成,如圖2所示。
2.1.1 主機控制電路
基于ATMegal28內部集成有64 kh Flash存儲器和豐富的硬件接口電路,不僅可以直接驅動繼電器,而且定時器的相頻修正PWM模式是基于雙斜坡操作可以產生高精度的、相位與頻率都準確的PWM波形,適合電機的調速控制,所以采用ATMegal28的最小系統作為系統的主機控制電路。
2.1.2 圖像采集模塊
系統采用OV7620攝像頭模塊進行路徑信息的采集。OV7620圖像傳感器不但可以直接輸出行場同步中斷信號,而且具有自動增益和自動白平衡控制,能進行亮度、對比度、飽和度等多種調節功能,不但省去了復雜的視頻解碼過程。而且使靶車能夠適應于不同的應用環境。實際上,控制靶車并不需要分辨率很高的圖像,相反分辨率低一些的圖像不僅有利于減少存儲所用的空間,而且加快單片機的圖像處理的速度。結合攝像頭的視野大小,系統將圖像采集分辨率由原始的492x664降低到25x47,保證系統能夠快速、有效的采集路勁信息。
2.1.3 電機驅動電路
雙極性可逆PWM系統雖然在低速時運行平穩,但電流波動大,功率損耗較大,尤其是必須增加死區來避免開關管直通的危險,限制了開關頻率的提高,所以系統采用單極性可逆PWM方式驅動電機,避免了開關管直通、提高系統的可靠性,盡管輕載時會出現斷流,可以通過提高開關頻率的方法或改進電路設計來克服,具有驅動能力強、控制簡單、速度快、可靠性高且成本低等優點。驅動控制器電路如圖3所示。













評論