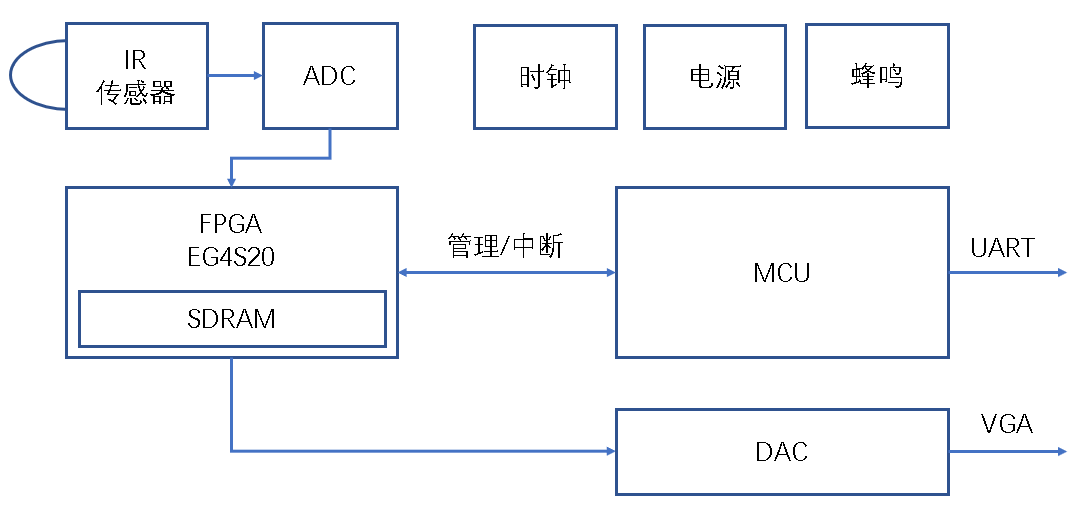
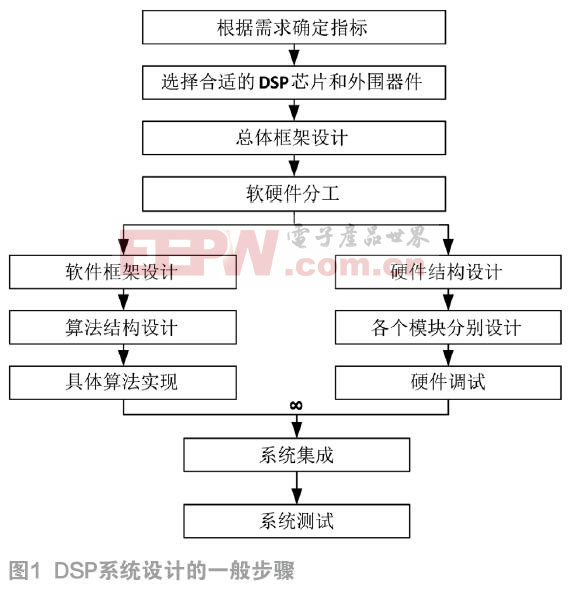
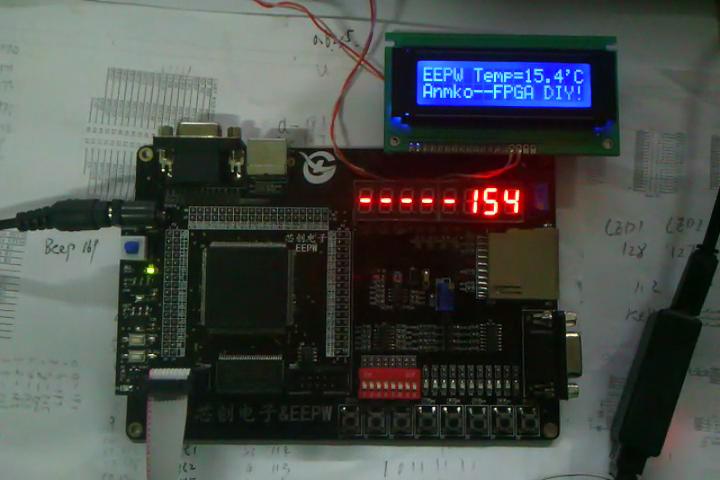
基于DS18B20的測溫實驗原理及實現

unsigned char tmrbyte (void) //讀一個字節
{
unsigned char i,j,dat;
dat = 0;
for (i=1;i=8;i++)
{ j = tmrbit(); dat = (j 7) | (dat >> 1); }
return (dat);
}
void tmwbyte (unsigned char dat) //寫一個字節
{
unsigned char j,i;
bit testb;
for (j=1;j=8;j++)
{ testb = dat 0x01;
dat = dat >> 1;
if (testb)
{ TMDAT = 0; //寫0
i++; i++;
TMDAT = 1;
for(i=0;i8;i++); }
else
{ TMDAT = 0; //寫0
for(i=0;i8;i++);
TMDAT = 1;
i++; i++;}
}
}
void tmstart (void) //發送ds1820 開始轉換
{ tmreset(); //復位
dmsec(1); //延時
tmwbyte(0xcc); //跳過序列號命令
tmwbyte(0x44); //發轉換命令 44H,
}
void tmrtemp (void) //讀取溫度
{
unsigned char a,b;
tmreset (); //復位
dmsec (1); //延時
tmwbyte (0xcc); //跳過序列號命令
tmwbyte (0xbe); //發送讀取命令
a = tmrbyte (); //讀取低位溫度
b = tmrbyte (); //讀取高位溫度
if(b>0x7f) //最高位為1時溫度是負
{a=~a; b=~b+1; //補碼轉換,取反加一
fg=0; //讀取溫度為負時fg=0
}
sdata = a/16+b*16; //整數部分
xiaoshu1 = (a0x0f)*10/16; //小數第一位
xiaoshu2 = (a0x0f)*100/16%10;//小數第二位
xiaoshu=xiaoshu1*10+xiaoshu2; //小數兩位
}
void DS18B20PRO(void)
{ tmstart();
//dmsec(5); //如果是不斷地讀取的話可以不延時 //
tmrtemp(); //讀取溫度,執行完畢溫度將存于TMP中 //
}
void Led()
{
if(fg==1) //溫度為正時顯示的數據
{ P2=P20xef;
P0=seg7code[sdata/10]; //輸出十位數
Delay(8); P2=P2|0xf0; P2=P20xdf;
P0=seg7code[sdata%10]|0x80; //輸出個位和小數點
Delay(8); P2=P2|0xf0; P2=P20xbf;
P0=seg7code[xiaoshu1]; //輸出小數點后第一位
Delay(8); P2=P2|0xf0; P2=P20x7f;
P0=seg7code[xiaoshu2]; //輸出小數點后第二位
Delay(4); P2=P2|0xf0;
}
if(fg==0) //溫度為負時顯示的數據
{ P2=P20xef;
P0=seg7code[11]; //負號
Delay(8); P2=P2|0xf0; P2=P20xdf;
P0=seg7code[sdata/10]|0x80; //輸出十位數
Delay(8); P2=P2|0xf0; P2=P20xbf;
P0=seg7code[sdata%10]; //輸出個位和小數點
Delay(8); P2=P2|0xf0; P2=P20x7f;
P0=seg7code[xiaoshu1]; //輸出小數點后第一位
Delay(4); P2=P2|0xf0;
}
}
main()
{fg=1;
while(1)
{
DS18B20PRO();
Led();
}
}本文引用地址:http://www.104case.com/article/163028.htm







評論