視頻融合在遙操作機器人系統中的應用

1 系統總體結構
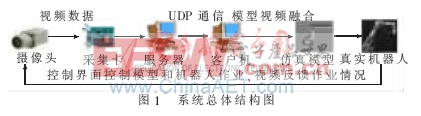
針對以上情況,本文提出采用建立標準坐標系使仿真機器人和反饋視頻在同一界面融合的方法,仿真模型預演作業任務而反饋視頻則跟蹤其軌跡進行作業,通過兩者對比及時發現機器人作業情況,一旦越界違規立刻停止。操作者也能根據兩者的比較了解現場環境,如出現障礙物或機器人傷人事件時,立刻做出下一步命令以避免危險發生。系統總體結構如圖1所示。具體工作流程:攝像頭采集真實機器人的視頻數據傳送到服務器端圖像采集卡的靜態內存中對其進行H.263壓縮,視頻數據壓縮后經網絡傳輸送到客戶機端。客戶機對數據進行解壓、還原、顯示、在仿真模型界面顯示視頻使兩者融合,同時客戶機實現操作界面程序編寫。操作界面包括視頻融合模塊、視頻處理模塊和控制模塊。視頻融合模塊對視頻進行相應的坐標變換后使其同仿真機器人在一個界面上重合顯示。視頻處理模塊包括視頻放大、視頻縮小、視頻保存、打開視頻、視頻截圖、存位圖、存JPEG圖、打開位圖、打開JPEG圖等功能。仿真三維立體模型采用3DSMAX建立,在OPENGL編程環境下對其進行相應的繪制及控制。反饋視頻數據經壓縮、傳輸、解壓、相應的坐標變換及比例縮放后在客戶端顯示。服務器完成視頻采集、壓縮、存儲、傳輸。客戶機完成仿真模型控制、解壓、顯示視頻,以及對視頻進行相應的放大、縮小、截圖、保存。由于網絡傳輸存在延時,而且這種延時除了傳輸指定距離所需的固定延時及指令執行延時外,還有一些隨機擾動延時,如果這種延時不能夠及時發現,操作者根據視頻反饋會做出錯誤判斷。根據這種情況在客戶端繪制接收數據字節曲線,可形象直觀地觀察到網絡狀況對視頻傳輸的影響,如圖2所示。

控制模塊如圖3所示,包括每個關節的啟動、停止按鈕、速度輸出及速度變量輸出顯示。

2 仿真模型建立及視頻融合實現
2.1 通信建立與視頻傳輸
網絡通信分為同步方式和異步方式。同步方式是發送方不等接收方響應,便接著發下一個數據包的通信方式;異步方式是發送方發出數據后,等收到接收方發回的響應,才發下一個數據包的通信方式。本系統開發的是客戶端/服務器(C/S)結構的軟件,該軟件是異步非阻塞模式。此模式的優點是既可以同步執行,也可以重疊執行。圖像在網絡中傳輸時,不可避免地要牽涉到傳輸協議的問題。TCP/IP是一組協議,其中底層的協議TCP和UDP對于圖像的傳輸起著至關重要的作用。TCP是面向連接的,即在端與端的通信中,TCP協議建立一條端與端之間的虛電路。UDP是一種面向無連接的,它取消了重傳校驗機制,能夠達到很高的通信效率,很適合于可靠性要求不高的數據傳輸。由于本機器人系統對視頻的丟幀情況要求不高,故采用客戶/服務器模式的UDP協議方式。視頻傳輸采用UDP傳輸,建立Socket類直接傳輸圖像數據,客戶端調用自寫show函數在OPENGL編程環境下繪制反饋視頻,實現視頻再現。系統中,使用MFC來開發通信程序及操作界面。這是因為MFC主要是基于窗口和文檔的應用軟件編程,它集成了大量的數據和方法,將許多煩瑣的任務,如應用程序初始化、文檔處理和磁盤I/O封裝起來,為使用者的編程帶來了巨大的方便。






評論