洗碗機水泵無傳感器PMSM驅動設計

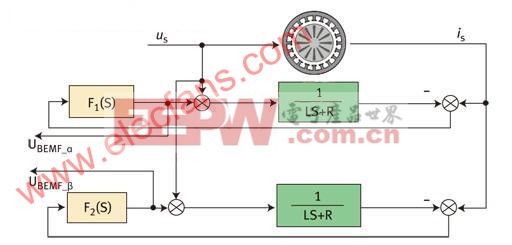
圖3:反電勢觀測儀框圖反電勢觀測儀輸出兩部分:( )和(
)和( )。這兩個信號生成關于轉子位置的信息。轉換成轉子軸角度的轉子電氣位置,可以由來自擴展反電勢估算的兩個輸入的反正切函數決定。這種方法產生轉子角度未過濾值,沒有速度信息。
)。這兩個信號生成關于轉子位置的信息。轉換成轉子軸角度的轉子電氣位置,可以由來自擴展反電勢估算的兩個輸入的反正切函數決定。這種方法產生轉子角度未過濾值,沒有速度信息。
估算轉子位置和速度的另外一個廣泛使用的方法是眾所周知的角度追蹤觀測儀。通過采用角度追蹤觀測儀,位置估算的噪音可以被過濾掉。角度追蹤觀測儀算法的另外一個優勢是:作為算法一部分,它還會估算出轉子速度。圖4描述了角度追蹤觀測儀的結構。
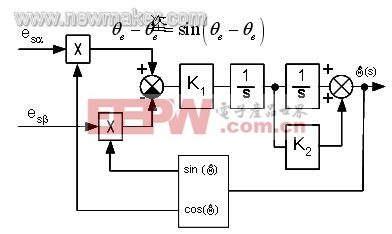
圖4:角度追蹤觀測儀框圖控制算法實現
以反電勢觀測儀和角度追蹤觀測儀為基礎且帶有轉子位置和速度估算算法的矢量控制方法,目前已經通過飛思卡爾的MC56F8006得以實現。
有三條控制環路控制速度、轉矩、磁鏈。控制算法在優先的中斷服務程序中執行。內部控制環路最為關鍵(q軸電流和d軸電流),每125μs執行一次。外部控制環路(速度)每1ms執行一次。內部控制環路不可中斷,這點可以通過為其分配適當的高中斷優先級得以保證。這種方法簡化了應用框架設計,允許中斷程序優先級由處理器自動管理。矢量控制算法處理以下模擬信號:
C 三個電機相電流(ia、ib、ic)。這些信號通過安裝在三個逆變電路底部的三個并聯電阻進行測量。
C DC總線電壓。
在任何給定實例中,只測量三個相電流中的其中兩個,計算第三個。當接通相應的底部晶體管,可以在并聯電阻器上看見電流。可以在其中測量電流的窗口依賴生成的PWM控制信號占空比,因此需要在適當且精確的瞬間開始ADC轉換流程。借助MC56F8006 DSC中特別設計的硬件,可以圓滿完成這一艱巨任務。PWM模塊生成的可配置同步脈沖,可以輸入到可編程時延塊(PDB)中。之后,同步脈沖由PDB模塊進行處理,輸出直接觸發ADC模塊,實現對ADC測量的精確同步控制。這種同步機制由硬件進行處理,沒有任何軟件干預。軟件只需要讀取ADC結果寄存器。這里描述的應用使用這一功能,每125μs轉換6個模擬信號。ADC模塊包含兩個獨立的12位ADC轉換器,在經過配置后可以依次、同時或并行運行。要進行相位電流取樣,使用同時運行模式同時在兩個相位上進行ADC測量。這樣就實現了精確的瞬時測量,三個相位電流都可以從該測量中提取。
由于反電勢觀測儀不從零速度開始運行,轉子通過驅動電機達到已知狀態(相位)進行校準,這樣我們就了解了初始轉子位置。然后使用開環啟動算法,將電機加速到反電勢觀測儀能夠提供精確反饋結果的速度。從開環啟動到閉環控制的切換平穩進行。
洗碗機水泵解決方案的運行圖如圖5所示,基于飛思卡爾MC56F8006的逆變器如圖6所示。
圖5:運行洗碗機泵演示

圖6:采用飛思卡爾MC56F8006器件的三相逆變器












評論